
In my opinion, a great reveal in a robot network is when a robot can no longer move ahead by itself. The job gets done, but the next step totally depends on some other robot who will have to do their work first. These sequences of dependencies are very typical in collaborative robotics. However, if the system fails to handle them effectively, such dependencies can become a major source of coordination friction.
Fabric tackles this problem by implementing verifiable task coordination. Each robot shares the result of its finished work with the network, and the outcome then becomes a part of the shared operational record. Instead of robots depending on informal signals or direct communication only, the network serves as a dependable reference for the actual completion of a prerequisite task.
This becomes particularly important when multiple robots are executing the same workflow. For instance, one robot may be in charge of gathering the data, another one might be analyzing the data, and the third one could be the robot that physically responds to the output, Now suppose, the first one finishes the job but the second one suddenly goes ahead and starts the processing without it waiting, then the whole sequence of events turns out to be chaotic. Fabric safeguards against this by making sure that task completion signals are not just informal assumptions but verifiable events.
Dependency chains and how they develop when many robots are acting simultaneously is what makes it fascinating. In large-scale coordinated environments, dozens of robots may be waiting for different prerequisites simultaneously. Without coordination, the network can easily enter idle periods when robots are unnecessarily waiting for updates. Fabrics shared coordination layer helps to mitigate that risk by providing each participant with a consistent view of which tasks have already been completed. $ROBO
During repeated coordination cycles, a pattern begins to emerge. Robots rarely wait long because dependency updates propagate quickly through the network's coordination record. When a robot finishes its job the next one in the queue can nearly instantly discover the new state and carry on with its work. The system, rather than being just a bunch of robots that randomly communicate with each other, is like a well-oiled production line where the next stage can always see the previous one.
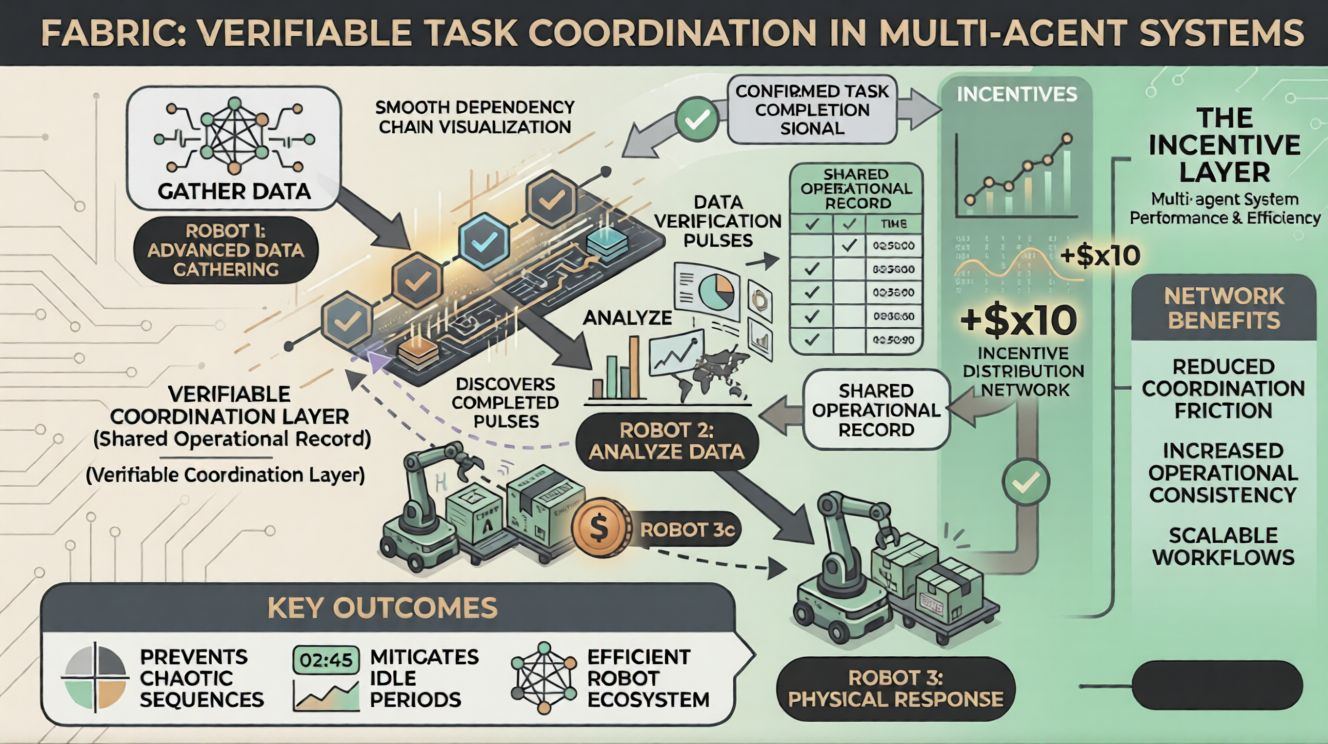
The token layer adds an additional element to this coordination model. $ROBO is not just a symbol of joining the network; it is used to incentivize and reward the faithful carrying out of tasks. Robots and operators that consistently complete verifiable tasks contribute to smoother dependency chains across the system. When prerequisite tasks are reported clearly and on time, downstream robots can act with confidence rather than hesitation.
This incentive alignment becomes particularly valuable during complex collaborative operations. In multi-agent environments, delays in early steps can ripple through entire workflows. A robot waiting for a prerequisite action may remain idle even if it is technically capable of working. Fabric’s coordination framework encourages timely reporting of task completion so that these dependency chains continue moving forward without unnecessary pauses.
A deeper insight appears when looking at the network over longer operational periods. Efficiency in a robot ecosystem does not only depend on how quickly individual machines perform their work. It also depends on how smoothly tasks connect with one another. A fast robot at the beginning of a chain does little good if downstream robots cannot reliably detect when its work has finished.
Fabric addresses this by turning task completion into a verifiable coordination signal shared across the network. Instead of robots guessing when the next step is ready, they rely on confirmed task outcomes recorded through the protocol. The result is a system where collaborative workflows remain structured even as the number of participating robots grows.
For developers building multi-agent applications, this coordination model offers an important advantage. Complex workflows can be designed with clear task dependencies, knowing that the network will provide reliable signals for when each stage is ready. Rather than constructing custom synchronization mechanisms for every application, developers can rely on Fabric’s shared coordination layer.
Operators benefit as well. Robots that are part of dependency chains are less difficult to control if they complete their tasks by giving signals that are not only confirmable but also visible to the entire system. In addition, workflows would continue to be orderly and coordination problems would be easier to detect and solve before they get worse.
Over time, the pattern becomes clear: robot collaboration depends as much on structured task sequencing as on individual machine capability. Fabric transforms dependency chains from a coordination risk into an organized process where robots can safely build on one another's work.
When one robot waits for another inside Fabric, that pause is not a weakness in the system. It is a signal that the network is ensuring every step of the workflow remains aligned before the next begins.