
I have noticed something about new systems that try to organize complex environments.
The technology usually arrives before the coordination does.
Engineers build machines that can perform tasks faster than humans. Software improves their ability to analyze data and make decisions. Over time the capabilities of the machines become impressive.
But the environment around those machines does not always evolve at the same speed.
That gap between capability and coordination is where many systems start to struggle.
It is also the place where Fabric Protocol begins to make sense.
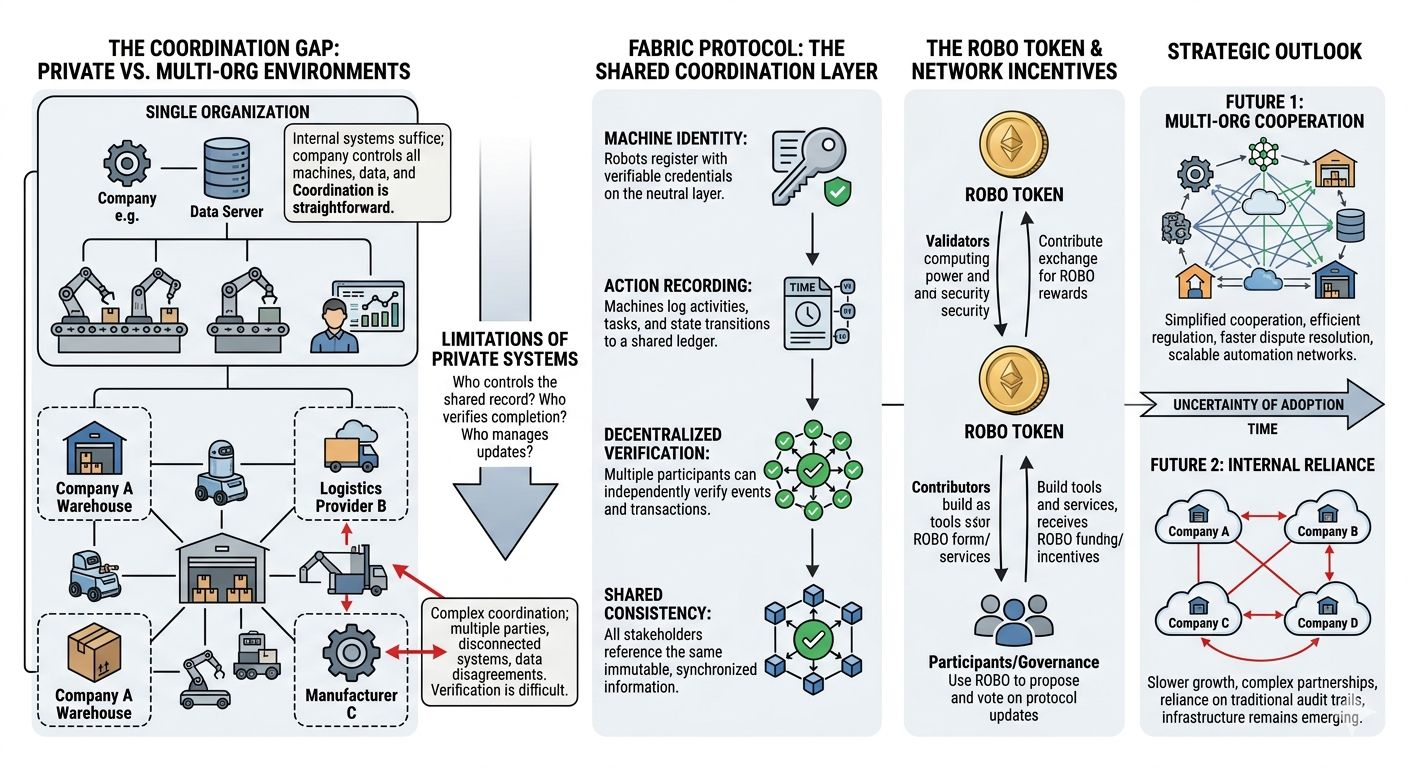
Most robots today operate inside controlled environments. A company purchases machines, installs them in its facilities, and manages them through internal software. The organization decides how the machines behave, how they are updated, and how the information they generate is stored.
Inside that structure coordination is simple.
The same organization controls every important decision.
The moment machines start operating in environments that involve multiple organizations, the situation becomes more complicated.
Consider a logistics system where robots move goods between warehouses owned by different companies. The machines might be built by one manufacturer, maintained by another provider, and deployed in spaces managed by several operators.
In that situation coordination is no longer contained within a single company.
Questions begin to appear that do not have easy answers.
Who controls the record of what the machines did?
Who verifies that a task was completed correctly?
Who decides how updates to the system should be applied?
Each organization involved in the environment may have its own systems and records. When those systems disagree, resolving the difference can take time and resources.
Fabric Protocol is built around the idea that this coordination problem will eventually require shared infrastructure.
Instead of relying entirely on private company systems, the protocol proposes a neutral layer where machines can maintain identities and their actions can be recorded in a way that different participants can verify.
The goal is not simply transparency.
It is consistency.
When several organizations depend on the same automated systems, they need a way to coordinate around the same information. A shared record of machine activity can reduce disagreements and make it easier to understand what happened when a system performs a task.
This is where Fabric’s economic structure becomes important.
The $ROBO token functions as the mechanism that allows participants to interact with the coordination layer. Validators help maintain the network that records machine activity. Contributors build tools and services around the protocol. Governance mechanisms allow participants to influence how the system evolves.
These incentives create the conditions for the coordination layer to exist.
But incentives alone do not guarantee that people will use the system.
The robotics industry already has ways to coordinate machines within individual organizations. Companies have developed internal tools for monitoring performance, recording activity, and managing updates.
Those systems may not be shared, but they are reliable and familiar.
For Fabric’s approach to become meaningful, the shared coordination layer must offer advantages that private systems cannot easily provide.
Those advantages may become visible when automation spreads into environments where several organizations depend on the same machines.
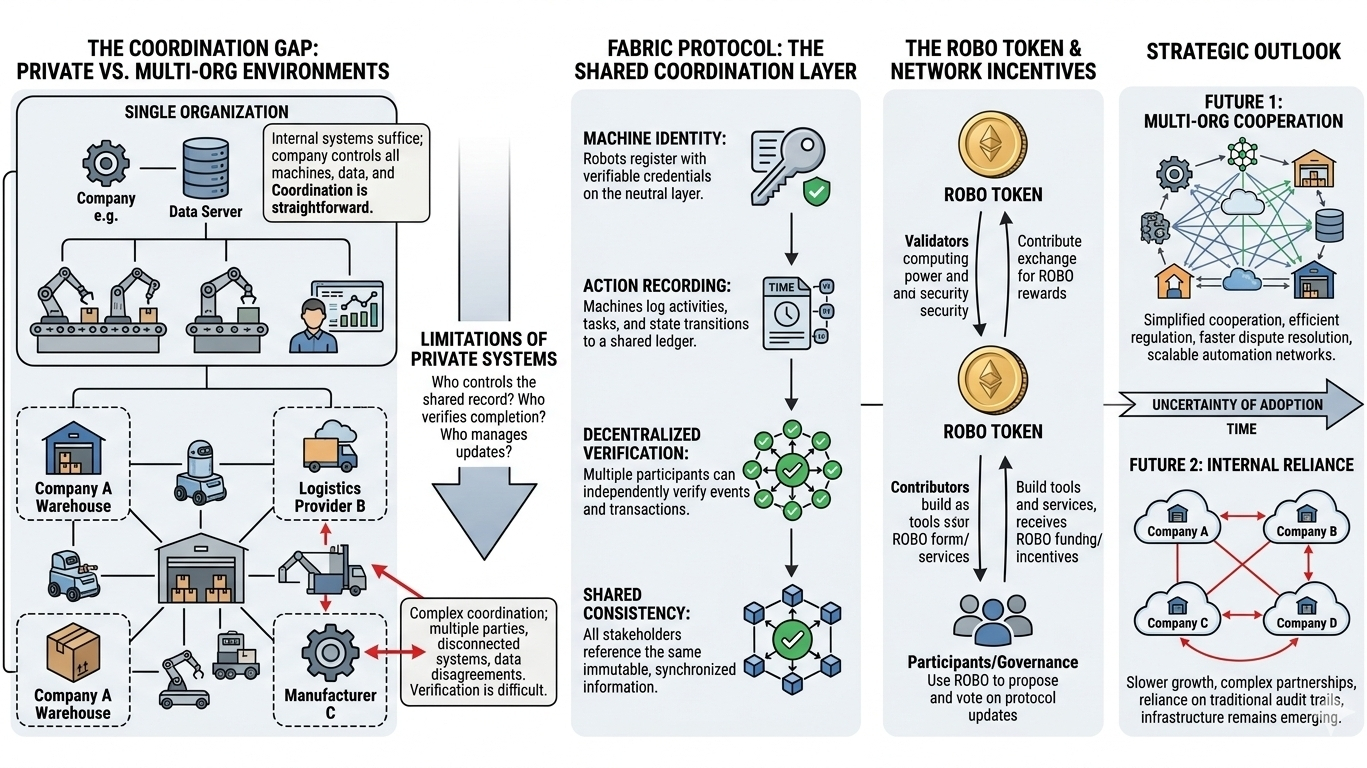
In those situations a neutral record of machine behavior can simplify cooperation between partners. It can provide regulators with reliable information about how automated systems operate. It can reduce the time required to resolve disagreements about what happened during a specific task.
These benefits become more valuable as automation networks grow larger.
Right now many robotic systems still operate within single organizations, where internal coordination is enough.
Infrastructure projects often appear before the problems they solve become widely recognized.
Fabric Protocol is built around the expectation that automation will eventually create environments where coordination across organizations becomes necessary.
If that expectation proves correct, shared infrastructure for machine coordination could become an important part of the automation ecosystem.
If the robotics industry continues relying on internal systems for a long time, the protocol may spend years demonstrating why its approach is useful.
That uncertainty is common for infrastructure.
The systems that eventually become essential usually begin as solutions for problems that are only beginning to appear.
Fabric is building with the belief that coordination between machines will eventually extend beyond company boundaries.
Whether that future arrives quickly or slowly is something the ecosystem will decide over time.