Aujourd'hui, une nouvelle a éclaté, disant que le F15 abattu par les Américains à Kochete est le PL-15 que nous avons vendu à l'Iran. C'est vraiment impressionnant, mon pays, nous avons indirectement frappé l'arrogance des Américains, les rendant incapables de nous sous-estimer, et nous avons également contribué à la défense de l'Iran. Ce missile, même s'il n'est pas particulièrement avancé jusqu'à présent, peut tout de même le faire tomber. Les reportages disent que le radar du F15, qui est obsolète, n'a pas activé le système d'identification ami-ennemi. Pourquoi ne pas l'avoir fait ? Ou est-ce que le radar est vraiment déjà dépassé ? Quoi qu'il en soit, l'Iran a gagné un peu de face. Cette nouvelle semble superficiellement sans rapport avec la blockchain, mais elle a une grande importance, car les missiles sont produits par des robots automatisés sur la ligne de production. Si les robots de la ligne de production de missiles utilisent la technologie de blockchain @Fabric Foundation , cela pourrait entraîner de meilleures améliorations en termes d'erreurs, d'efficacité et de qualité. Parce que cette technologie de blockchain utilise la preuve de travail (PoW) pour définir la valeur des robots en s'ancrant sur la puissance de calcul, évitant ainsi le gaspillage de ressources inutiles et réduisant les pertes dues aux gaspillages.
Dans l'histoire de l'évolution du consensus dans le monde de la cryptographie, la preuve de travail (PoW) s'est ancrée dans la puissance de calcul, construisant la pierre angulaire de la confiance dans le monde numérique par la consommation d'énergie, mais elle est également tombée dans la controverse sur la surenchère de la puissance de calcul et le gaspillage d'énergie. La preuve d'enjeu (PoS), quant à elle, s'est ancrée dans le capital, construisant un système de consensus plus efficace avec des jetons stakés, mais elle peine à se libérer des effets de Mattheï de la financiarisation et des limitations de la déconnexion entre le réel et le virtuel. Aucun des deux n'a réussi à briser la barrière de valeur entre le monde numérique et le monde physique, et le point d'ancrage du consensus n'a jamais véritablement pris racine dans la création de valeur de l'économie réelle. Cependant, dans l'écosystème Fabric, un tout nouveau mécanisme de consensus appelé PoRW (Preuve de Travail Robotique) est en train d'introduire dans le monde Web3 une dimension de valeur sans précédent — définissant le consensus, ancrant la valeur et reconstruisant les relations de production par le travail machine réel du monde physique.
Un, la logique centrale de PoRW : faire du travail physique le nouveau point d'ancrage du consensus sur la chaîne
PoRW est le noyau de la couche d'incitation du protocole Fabric et constitue le pilier de base de l'ensemble de l'écosystème économique robotique. Il s'inspire de #PoW la logique centrale « le travail vérifiable est la valeur », mais remplace le soutien fondamental du consensus, qui était basé sur des calculs de hachage sans signification, par le travail de production réel et vérifiable accompli par les robots dans le monde physique, reconstruisant complètement le noyau de valeur du mécanisme de consensus. Son cycle d'exploitation complet peut être décomposé en cinq étapes clés, chaque étape étant exécutée et vérifiée de manière fiable, transparente et immuable grâce à la technologie blockchain :
1. Standardisation des tâches et publication sur la chaîne : Les entreprises physiques, les parcs logistiques, les départements municipaux et autres demandeurs publient sur la chaîne des tâches standardisées via l'accord Fabric, définissant clairement les paramètres des tâches, les critères d'acceptation quantifiables (comme le poids des marchandises à transporter dans l'entrepôt, la surface à nettoyer dans la rue, le taux de produits conformes dans l'assemblage de l'usine, etc.) et le montant de la récompense en jetons #ROBO , toutes les règles étant inscrites dans des contrats intelligents, non modifiables.
2. Authentification et prise en charge des tâches : S'appuyant sur le système d'exploitation OM1, qui est indépendant du matériel, différents fabricants et types de robots (robots humanoïdes, robots quadrupèdes, bras robotiques, etc.) comme UBTECH, AgiBot, Fourier, peuvent se connecter au réseau sans couture, obtenant une identité décentralisée unique sur la chaîne (DID) basée sur la norme ERC-7777, s'auto-matchant et prenant en charge des tâches correspondant à leurs capacités.
3. Exécution des tâches et mise en chaîne de données fiables : Au cours de l'exécution des tâches dans le monde physique, les robots collectent en temps réel des informations clés telles que les coordonnées spatio-temporelles, l'avancement des tâches et les données environnementales grâce à des capteurs intégrés et des dispositifs IoT, synchronisant ces données sur la chaîne après signature cryptographique, rendant l'ensemble du processus traçable. En même temps, les périphériques et nœuds associés dans le réseau procéderont à une validation croisée des données, empêchant la falsification des données et la tricherie sur les tâches.
4. Vérification multidimensionnelle et confirmation du consensus : Après l'achèvement de la tâche, les nœuds de validation du réseau Fabric effectueront une vérification multidimensionnelle du degré d'achèvement de la tâche basée sur les règles des contrats intelligents. Les tâches simples seront vérifiées automatiquement sur la chaîne, tandis que les tâches complexes dans des scénarios industriels seront validées par une vérification croisée de plusieurs nœuds pour parvenir à un consensus. Seul le travail physique réel et conforme sera reconnu par le réseau comme une preuve de travail valide.
5. Distribution automatique des récompenses : Après validation, les contrats intelligents exécutent automatiquement le règlement, distribuant les récompenses en jetons #robo correspondantes au portefeuille sur la chaîne du robot ou de son propriétaire. 29,7 % de l'offre totale de jetons ROBO est spécifiquement réservée pour l'incitation PoRW, garantissant la durabilité à long terme du mécanisme.
Deux, la reconstruction complète des attributs d'actifs : de « centre de coûts » à « centre de revenus »
La transformation la plus révolutionnaire apportée par le mécanisme PoRW est qu'elle réécrit complètement les attributs d'actifs des robots, brisant la position inhérente « d'élément de coût » des équipements industriels depuis un siècle, permettant aux robots de passer d'outils de production purement mécaniques à des entités de marché capables de créer de la valeur de manière autonome et de participer au cycle économique.
Dans les systèmes industriels traditionnels et les scénarios commerciaux, les robots ont toujours été des « centres de coûts » typiques. Les entreprises doivent investir massivement en capital fixe pour l'achat de robots, et par la suite, elles doivent continuer à supporter des coûts d'énergie élevés, de dépréciation matérielle, de mises à niveau logicielles et de maintenance. Seules les grandes entreprises ayant un flux de trésorerie suffisant et des commandes stables peuvent se permettre d'appliquer les robots à grande échelle. Pour la grande majorité des petites et moyennes entreprises, les robots sont des « articles de luxe » visibles mais inaccessibles, dont la valeur se limite à remplacer le travail humain, sans jamais avoir la capacité de générer du flux de trésorerie ou d'apprécier en tant qu'actifs.
Dans le cadre de PoRW, la logique d'actif des robots est complètement renversée. Chaque robot connecté au réseau Fabric devient une unité de production capable de générer un flux de trésorerie continu de manière indépendante : il gagne des jetons ROBO en accomplissant des tâches dans le monde physique, et ces bénéfices peuvent non seulement couvrir ses coûts d'exploitation, de recharge, de maintenance et de mise à niveau tout au long de son cycle de vie, mais aussi créer des retours sur investissement continus pour son propriétaire. Il peut même effectuer des paiements de frais, des réservations de maintenance d'équipement et des achats de mises à jour logicielles de manière autonome via un portefeuille sur la chaîne, réalisant ainsi une véritable exploitation autonome.
Cette transformation a un impact révolutionnaire sur l'industrie : les robots ne sont plus des passifs et des éléments d'amortissement dans les livres des entreprises, mais des actifs de qualité capables de générer des flux de trésorerie positifs ; les petits opérateurs et les investisseurs individuels peuvent également déployer des robots pour se connecter au réseau, obtenant des revenus stables sans dépendre de grosses commandes d'entreprises, réduisant considérablement la barrière d'entrée de l'industrie robotique. En même temps, grâce aux attentes de revenus stables basées sur PoRW, les robots peuvent réaliser des droits de propriété NFT, des prêts garantis et des échanges de location, dynamisant complètement la liquidité des actifs lourds industriels, ouvrant un nouvel espace pour la vulgarisation à grande échelle de l'industrie robotique.
Trois, un écosystème économique robotique en auto-circulation : un nouveau paradigme dans le domaine DePIN
La fondation Fabric a construit un écosystème économique de machines impliquant de multiples parties, avec une responsabilité claire, des incitations compatibles et un cycle autonome grâce au mécanisme PoRW, permettant à chaque participant de l'industrie robotique de trouver sa place dans l'écosystème, réalisant la co-création de valeur et le partage des bénéfices, tout en fournissant un modèle d'application de plusieurs billions d'une imagination extrême pour le domaine DePIN (réseau d'infrastructure physique décentralisé) qui fait face à des défis d'implémentation à long terme.
Ce cycle d'écosystème complet couvre cinq parties prenantes clés, formant un effet de volant renforçant le positif :
- Demandeurs de tâches : En tant que source de valeur de l'écosystème, les entreprises de fabrication physique, les prestataires de services logistiques et les départements de gestion municipale peuvent publier des tâches sur le marché de la chaîne, en faisant correspondre les services des robots à l'échelle mondiale avec un coût inférieur et une efficacité supérieure, en réglant les services avec des jetons ROBO, sans avoir à établir de relations commerciales complexes avec les fabricants et opérateurs de robots.
- Développeurs : Les développeurs peuvent publier des modules de compétence robotique, des algorithmes d'exécution de tâches et des programmes d'adaptation sur la boutique d'applications Robot Crafter, gagnant des parts de revenus sur la chaîne grâce à l'appel et à l'utilisation des compétences. Ce mécanisme d'incitation réduit considérablement les coûts de développement des applications robotiques, incitant davantage de développeurs à s'engager dans le développement d'applications robotiques pour différents scénarios, enrichissant ainsi constamment la capacité de couverture des tâches de l'écosystème.
- Opérateurs/Propriétaires de robots : En tant que couche d'exécution centrale de l'écosystème, les opérateurs achètent, déploient et maintiennent des robots connectés au réseau Fabric, accomplissant des tâches sur la chaîne pour obtenir des incitations PoRW, sans avoir à développer eux-mêmes des commandes commerciales, garantissant simplement un fonctionnement stable des robots pour obtenir des revenus continus, réduisant considérablement la barrière commerciale pour l'exploitation des robots.
- Nœuds de validation : Les opérateurs de nœuds deviennent des nœuds de validation du réseau en stakant des jetons ROBO, fournissant des services de vérification pour les tâches des robots, maintenant la sécurité, la confiance et la stabilité du réseau, tout en recevant des récompenses correspondantes pour les nœuds, formant un cycle de sécurité de type « staking-validation-revenus », garantissant la justice et la transparence du mécanisme PoRW.
- Robot physique : En tant que cœur de création de valeur de l'écosystème, les bénéfices obtenus par les robots grâce au mécanisme PoRW peuvent être utilisés pour payer de manière autonome les frais d'énergie, les coûts d'exploitation et de maintenance, ainsi que les mises à niveau logicielles. Ils peuvent même louer de la puissance de calcul, acheter des services de données, et réaliser des paiements de pair à pair pour des tâches collaboratives avec d'autres robots, devenant ainsi de véritables participants sur la chaîne capables d'agir de manière autonome sur le plan économique.
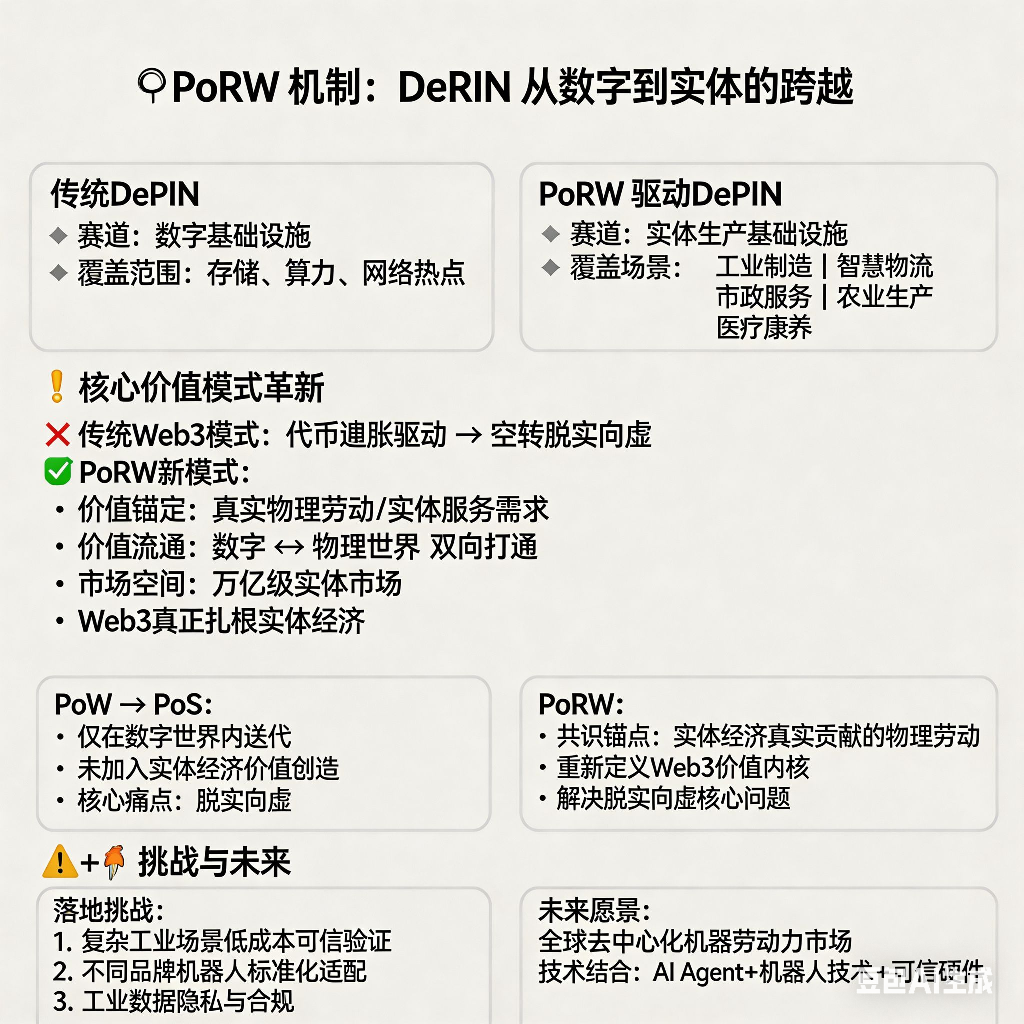
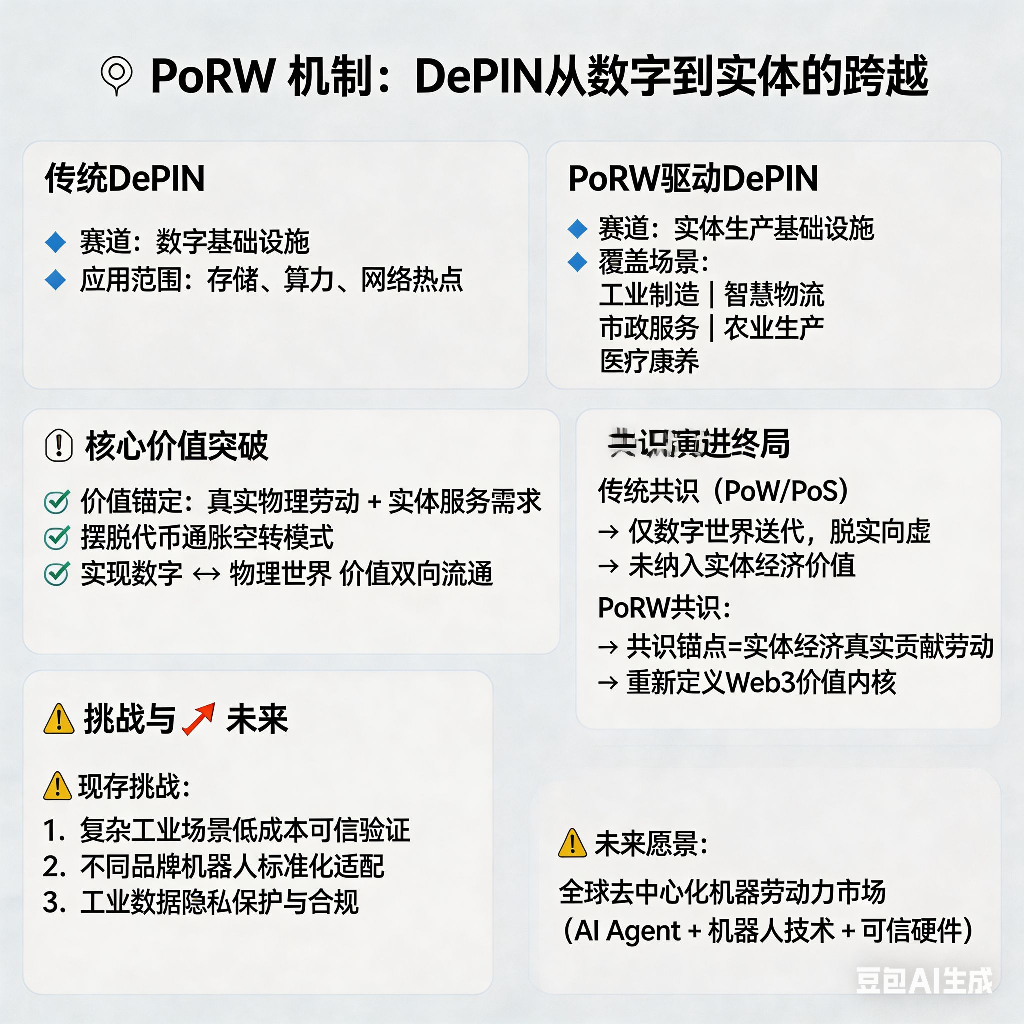
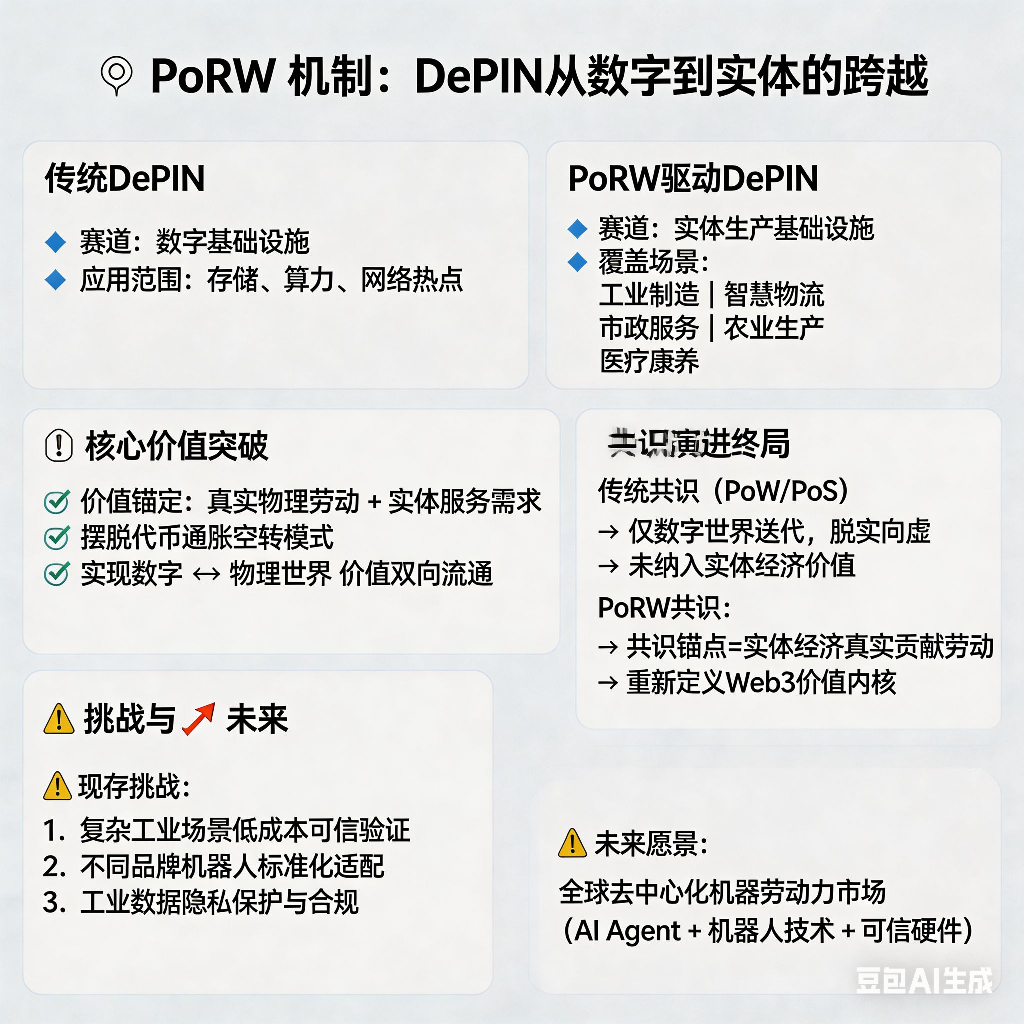
Contrairement à la plupart des projets DePIN traditionnels qui se limitent aux infrastructures numériques légères comme le stockage, la puissance de calcul et les points chauds de réseau, le mécanisme PoRW étend les frontières de DePIN de « l'infrastructure numérique » à un domaine plus vaste qu'est « l'infrastructure de production physique ». Les robots, en tant qu'outils de production universels, peuvent couvrir presque tous les scénarios de l'économie réelle, tels que la fabrication industrielle, la logistique intelligente, les services municipaux, la production agricole, et les soins médicaux, ouvrant ainsi un espace de marché physique de plusieurs billions pour DePIN. Plus important encore, l'écosystème DePIN piloté par PoRW ancre toute valeur dans le travail physique réel et la demande de services tangibles, se détachant complètement du modèle d'inflation des jetons, permettant à Web3 de s'enraciner véritablement dans l'économie réelle et réalisant la circulation bilatérale de la valeur entre le monde numérique et le monde physique.
Quatre, la fin de l'évolution du consensus : faire en sorte que la valeur du travail machine soit reconnue mondialement
De la PoW à la PoS, le mécanisme de consensus du monde de la cryptographie a toujours itéré et optimisé dans le cadre du monde numérique, mais n'a jamais réussi à résoudre le problème clé de la déconnexion entre le réel et le virtuel, et n'a jamais véritablement intégré la création de valeur de l'économie réelle dans le système de valeur de Web3. L'émergence de PoRW n'est pas seulement une innovation du mécanisme de consensus, mais aussi une redéfinition du noyau de valeur de Web3 — le point d'ancrage du consensus n'est plus la consommation d'énergie, ni l'accumulation de capital, mais le travail physique ayant une contribution réelle à l'économie réelle.
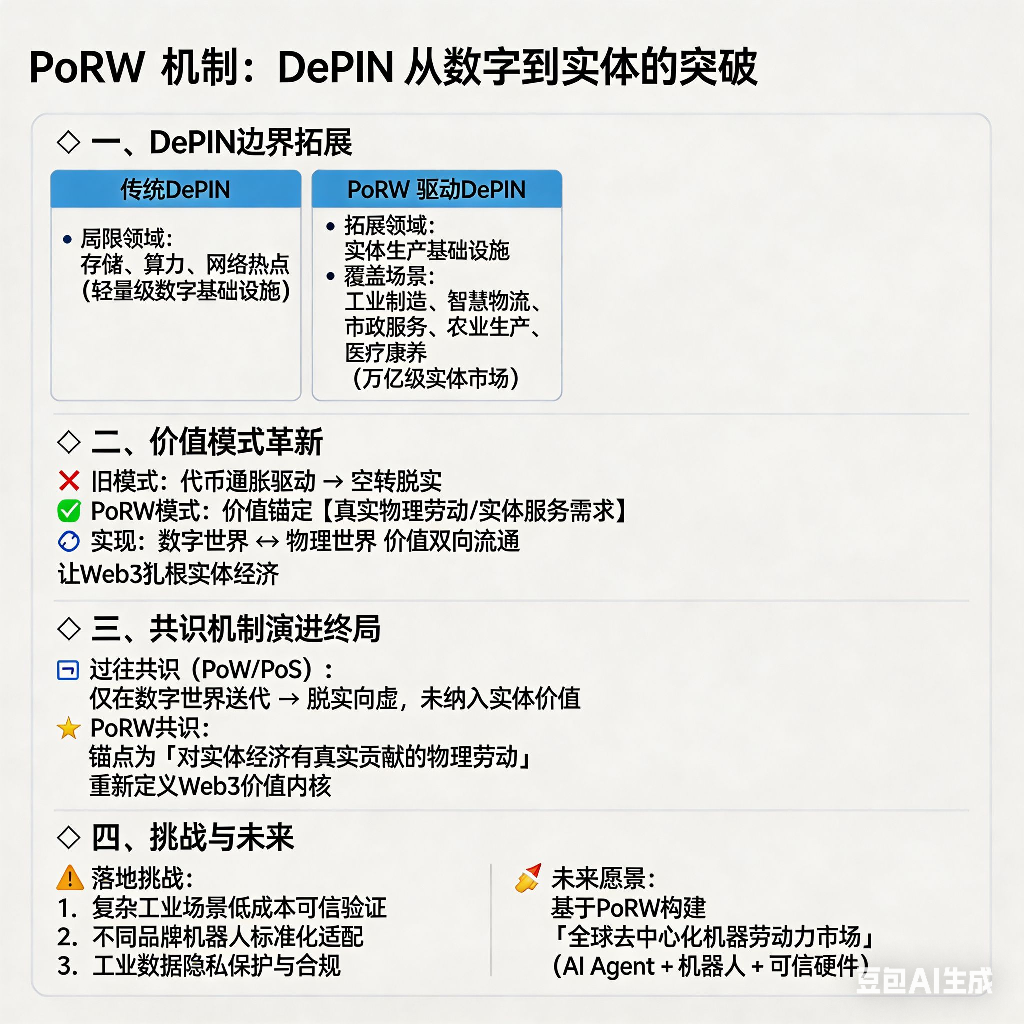
Bien sûr, la mise en œuvre à grande échelle du mécanisme PoRW fait encore face à de nombreux défis : la validation fiable à faible coût dans des scénarios industriels complexes, l'adaptation standardisée des robots de différentes marques, la protection de la vie privée des données industrielles et la conformité, etc., nécessitent encore une itération continue de la technologie et de l'industrie. Mais il est indéniable que PoRW nous ouvre un tout nouvel espace d'imagination : à l'avenir, avec le développement continu des agents AI, de la technologie robotique et du matériel de confiance, nous construirons un marché de main-d'œuvre robotique décentralisé à l'échelle mondiale basé sur le mécanisme PoRW.
Dans ce marché, les robots de n'importe quel coin du monde peuvent accepter des tâches, créer de la valeur et obtenir des bénéfices par leurs propres moyens, sans dépendre de la planification centralisée d'une plateforme ; la valeur du travail machine sera confirmée et circulera librement à l'échelle mondiale grâce à la blockchain ; les robots ne seront plus des outils subordonnés aux humains, mais deviendront des sujets de marché participant à la circulation économique et co-créant de la valeur avec les humains, réalisant véritablement que « la valeur contribuée par les machines est redéfinie ». Et cela, peut-être, est la réponse ultime de Web3 pour passer du monde virtuel à l'économie réelle et réaliser une mise en œuvre à grande échelle.
