Lorsque j'entends des gens parler d'innovation robotique ouverte, ma première réaction n'est pas l'excitation face à de nouvelles machines ou des démonstrations d'automatisation effectuant des tâches complexes, mais la curiosité sur l'infrastructure qui rend ces machines possibles en premier lieu, car la robotique ne devient pas vraiment ouverte simplement en publiant des conceptions ou en permettant aux développeurs de créer des applications, elle devient ouverte uniquement lorsque la coordination sous-jacente des données, du calcul, de la propriété et de la gouvernance est structurée de manière à ce que plusieurs participants puissent contribuer et bénéficier sans dépendre d'une seule autorité centrale pour définir les règles.

Depuis des années, l'industrie de la robotique a fonctionné selon un modèle où l'innovation est techniquement impressionnante mais structurellement fermée, ce qui signifie que les entreprises construisent des systèmes robotiques puissants mais que les données qu'ils génèrent, les algorithmes qui les guident, et la valeur économique qu'ils produisent restent enfermés dans des écosystèmes propriétaires qui limitent la collaboration et empêchent les communautés de recherche et de développement plus larges de participer à l'évolution de la technologie. Cet arrangement a produit des machines remarquables, mais il a également créé un environnement où le progrès dépend fortement des ressources et des priorités de quelques organisations plutôt que de l'intelligence collective d'un réseau mondial.
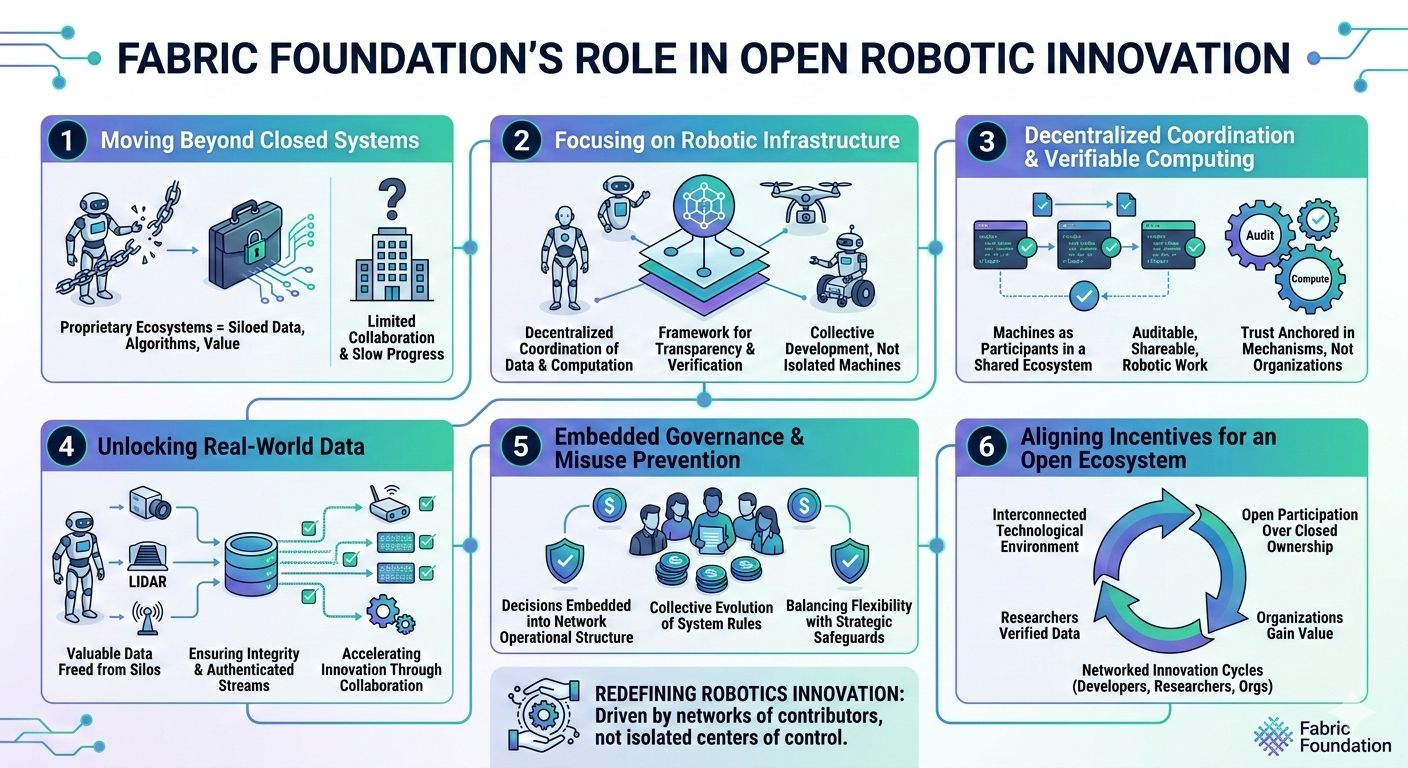
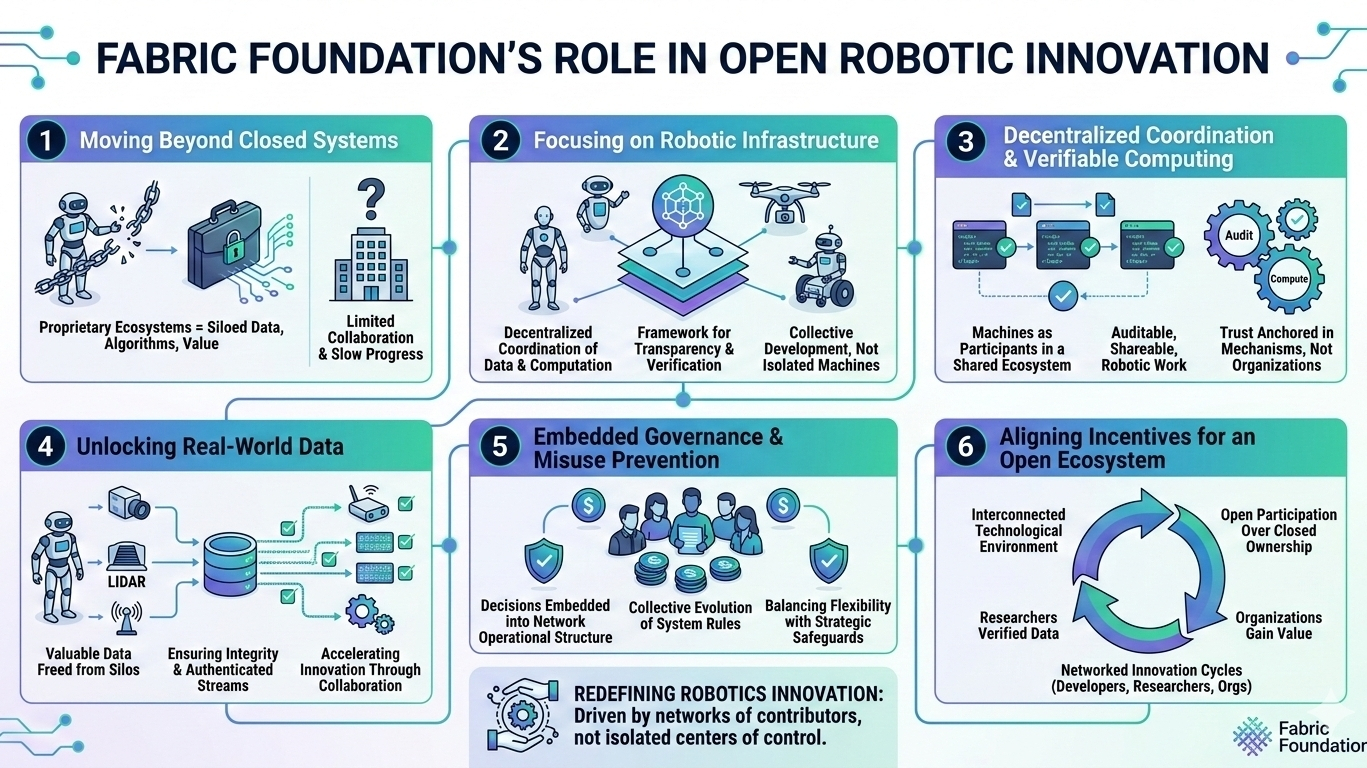
La conversation autour de l'innovation robotique ouverte devient donc beaucoup plus significative lorsque l'accent est mis sur les systèmes qui permettent à ces robots de coordonner leur travail, de partager des données vérifiables et d'évoluer par la collaboration plutôt que par l'isolement. C'est ici que l'approche infrastructurelle introduite par la Fabric Foundation commence à changer le paysage, non en construisant un type unique de robot ou en promouvant un design matériel spécifique, mais en créant un cadre de réseau où les systèmes robotiques peuvent fonctionner en tant que participants dans un écosystème technologique partagé qui valorise la transparence, la vérification et le développement collectif.
Dans les architectures robotiques traditionnelles, chaque machine fonctionne en grande partie comme une unité autonome contrôlée par l'organisation qui la possède, et bien que ces systèmes puissent échanger des informations via des APIs ou des services cloud, la structure fondamentale reste centralisée, ce qui signifie que la confiance dans le système dépend finalement de la confiance dans l'organisation qui opère l'infrastructure. Ce dispositif fonctionne pour de nombreux cas d'utilisation industriels, mais il devient limitant lorsque la robotique commence à s'étendre à des applications sociétales plus larges où les machines interagissent avec divers acteurs, contribuent des données à des environnements partagés et participent à des flux de travail collaboratifs qui s'étendent au-delà des limites opérationnelles d'une seule entreprise.
Le modèle d'infrastructure développé par Fabric introduit une manière différente de penser la coordination robotique, où les machines ne sont pas simplement des dispositifs exécutant des instructions isolées mais des participants dans un réseau distribué où leurs actions, calculs et résultats de données peuvent être vérifiés à travers des mécanismes transparents plutôt que d'être simplement dignes de confiance parce qu'ils proviennent d'une organisation spécifique. En combinant la coordination décentralisée avec des principes de computation vérifiable, le protocole permet une structure dans laquelle le travail robotique devient auditible, partageable et interopérable entre différents opérateurs, développeurs et groupes de recherche.
Une fois que la robotique commence à fonctionner dans ce type d'environnement, les implications s'étendent bien au-delà de la conception technique des machines individuelles, car l'innovation ouverte ne concerne pas seulement qui peut construire des robots mais aussi qui peut accéder aux connaissances générées par l'activité robotique et comment cette connaissance contribue à l'évolution de l'écosystème. Les données collectées par les machines effectuant des tâches dans le monde réel représentent l'une des ressources les plus précieuses dans le développement de la robotique, pourtant dans les modèles traditionnels, ces données restent souvent isolées, empêchant les chercheurs et les développeurs de s'appuyer dessus de manière à accélérer le progrès dans l'ensemble du domaine.
L'introduction de la coordination des données vérifiables à travers une couche d'infrastructure change cette dynamique en permettant aux systèmes robotiques de contribuer des informations aux réseaux partagés tout en maintenant des mécanismes d'authentification et de responsabilité, assurant que les participants peuvent compter sur l'intégrité des informations sans avoir besoin de faire confiance à l'entité qui les a initialement générées. Dans cet environnement, l'innovation devient moins dépendante de percées isolées et plus dépendante de la collaboration cumulative, où les améliorations réalisées par un participant peuvent éclairer le travail des autres à travers le réseau.
Cependant, la création d'un cadre pour l'innovation robotique ouverte soulève également de nouvelles questions sur la gouvernance et la responsabilité, car une fois que les machines commencent à contribuer des données et à exécuter des tâches au sein d'une infrastructure partagée, il devient nécessaire de déterminer comment les décisions concernant les règles du système, les autorisations d'accès et les normes opérationnelles sont prises. La couche de gouvernance devient donc aussi importante que l'infrastructure computationnelle elle-même, puisque le succès à long terme d'un écosystème ouvert dépend de l'équilibre entre la flexibilité pour les développeurs et les garde-fous qui empêchent les abus ou l'instabilité au sein du réseau.
C'est une autre dimension où l'architecture soutenue par Fabric devient stratégiquement significative, car le protocole ne traite pas la gouvernance comme une réflexion après coup mais l'intègre directement dans l'infrastructure qui coordonne l'activité des machines. En intégrant des cadres de prise de décision dans la structure opérationnelle du réseau, l'écosystème peut évoluer collectivement plutôt que de s'appuyer sur une seule autorité pour dicter la direction du développement.
D'un point de vue plus large, l'aspect le plus intéressant de cette approche n'est pas simplement que les robots peuvent partager des données ou coordonner des tâches à travers un réseau décentralisé, mais que les incitations économiques et technologiques au sein du système commencent à s'aligner sur la participation ouverte plutôt que sur la propriété fermée. Les développeurs obtiennent la capacité de créer des applications qui interagissent avec un réseau de machines plutôt qu'avec la plateforme d'un unique fournisseur, les chercheurs accèdent à des données vérifiables qui soutiennent l'expérimentation et la découverte, et les organisations déployant des robots bénéficient d'un cadre où leurs contributions peuvent générer de la valeur au-delà de la tâche immédiate que ces machines exécutent.
Ce changement d'incitations transforme progressivement la robotique d'une collection de systèmes isolés en un environnement technologique interconnecté où les machines, les développeurs et les organisations contribuent tous à un cycle d'innovation partagé. Au lieu que chaque nouvelle génération de robots émerge de laboratoires corporatifs séparés, les améliorations peuvent se propager à travers l'écosystème de manière à accélérer le progrès tout en maintenant la transparence sur la manière dont ces améliorations sont mises en œuvre.
Bien sûr, l'efficacité de cette vision dépend finalement de la performance de l'infrastructure lorsque l'écosystème croît en échelle et en complexité, car les systèmes ouverts doivent être résilients non seulement en période de développement rapide mais aussi lors de moments où des intérêts concurrents, des défis techniques ou des comportements inattendus mettent à l'épreuve la stabilité du réseau. Les cadres de coordination qui paraissent élégants en théorie doivent prouver qu'ils peuvent maintenir la fiabilité, la responsabilité et la sécurité même lorsque la participation s'élargit et que le volume des données générées par les machines augmente de manière spectaculaire.
C'est pourquoi le rôle des fournisseurs d'infrastructure dans l'innovation robotique ouverte est bien plus significatif qu'il n'y paraît initialement, car ils sont responsables de s'assurer que les mécanismes permettant la collaboration n'introduisent pas de vulnérabilités qui sapent la confiance dans le système. Si la vérification échoue, la gouvernance devient inefficace ou la coordination se dégrade sous pression, la promesse de la robotique ouverte pourrait facilement revenir au modèle familier de plateformes propriétaires isolées.
Vu de cette perspective, la véritable importance de l'approche de Fabric réside non pas dans la promotion d'une catégorie spécifique de robots ou d'applications, mais dans l'établissement des conditions structurelles qui permettent à la robotique d'évoluer en tant que domaine technologique véritablement collaboratif plutôt qu'une collection fragmentée de systèmes indépendants. En créant une infrastructure qui connecte les machines, les développeurs et les organisations à travers une computation vérifiable et une coordination décentralisée, la fondation tente de redéfinir comment l'innovation se produit au sein de l'un des domaines technologiques les plus transformateurs de l'ère moderne.
La signification à long terme de cet effort sera finalement mesurée non par le nombre de robots connectés au réseau à court terme, mais par la capacité de l'écosystème à démontrer que l'infrastructure ouverte peut soutenir une collaboration fiable, sécurisée et évolutive parmi les machines opérant dans le monde réel. Si ce résultat est atteint, alors la signification de l'innovation robotique ouverte passera d'un idéal abstrait à une réalité pratique où l'évolution de la robotique est guidée par des réseaux de contributeurs plutôt que par des centres de contrôle isolés.
@Fabric Foundation #ROBO $ROBO


