Je pensais auparavant que les robots deviendraient intelligents d'un seul coup. Une percée. Un grand bond. Puis tout à coup, les machines comprendraient le monde. Mais au cours de la semaine dernière, tout en étudiant l'architecture derrière le $ROBO écosystème, j'ai mené une petite expérience mentale. Et plus je lis, plus il semble que le contraire pourrait être vrai.
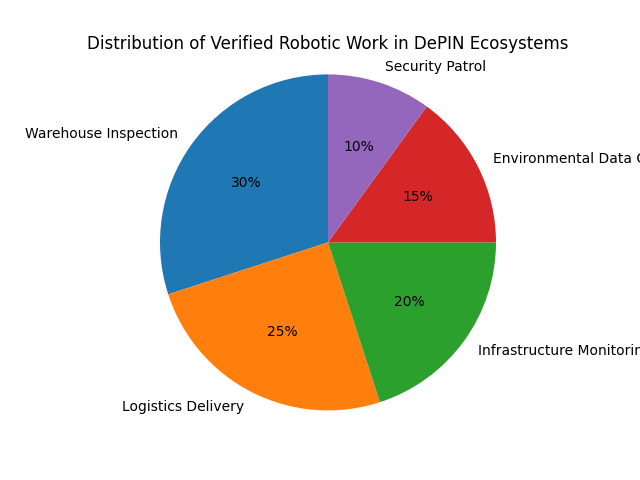
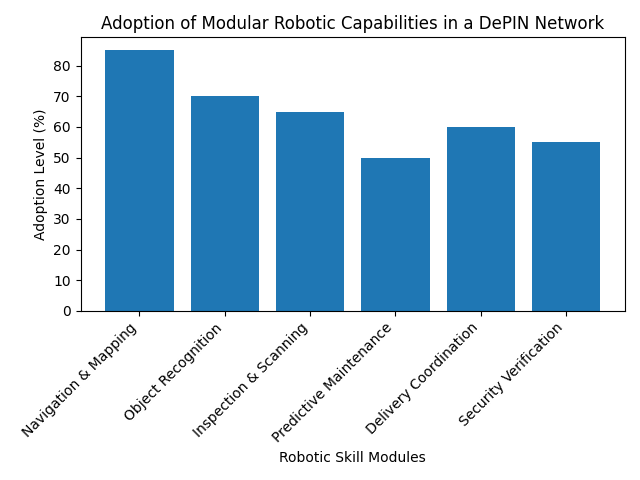 Les machines apprennent probablement par morceaux. Cette réalisation est venue en fouillant dans un concept circulant discrètement au sein des capacités robotiques modulaires de l'écosystème Fabric, parfois décrit dans des discussions entre développeurs comme une architecture basée sur les compétences. L'idée n'est pas de construire un robot parfait qui sache tout. Au lieu de cela, les machines acquièrent des capacités étape par étape. Un module à la fois. Une fonction à la fois. En 2026, ce concept attire l'attention dans les cercles de recherche en robotique liés aux réseaux d'infrastructure décentralisés. La documentation de Fabric laisse entendre un design modulaire où les machines peuvent adopter de nouveaux comportements sans remplacer l'ensemble du système matériel. Cela compte car le matériel de robotique évolue lentement. Le logiciel évolue beaucoup plus rapidement. Et les systèmes qui évoluent plus vite ont tendance à gagner. Au sein de l'architecture de Fabric, la couche de coordination tourne autour de quelque chose appelé Preuve de Travail Robotique. Le concept est simple à expliquer même si le système sous-jacent est complexe. Un robot effectue une tâche. Le réseau vérifie que la tâche a eu lieu. L'activité devient un enregistrement permanent sur la chaîne. Une fois vérifiée, le système peut distribuer des incitations via le token ROBO. La vérification crée une responsabilité. La responsabilité crée la confiance. Mais pour qu'un robot puisse effectuer différents types de tâches, il doit posséder les bonnes capacités. Navigation. Reconnaissance d'objets. Logique d'inspection. Coordination de livraison. Ces capacités n'arrivent que rarement d'un seul coup. Elles sont construites en couches. C'est là que la robotique modulaire entre en jeu. Au lieu de remplacer les machines chaque fois que la technologie s'améliore, le réseau peut permettre aux robots d'adopter de nouvelles "compétences". Un robot d'entrepôt pourrait commencer par un mouvement et une cartographie de base. Plus tard, il reçoit un module de vision qui lui permet de scanner les étagères d'inventaire. Encore plus tard, il pourrait adopter un module de routage prédictif qui optimise le trafic dans l'entrepôt. La machine évolue par des mises à niveau plutôt que par remplacement. Hmmm… plus j'y pense, plus cela ressemble à l'évolution des smartphones. Les premiers téléphones étaient limités. Puis des écosystèmes d'application sont apparus. Les développeurs ont construit des logiciels qui étendaient ce que l'appareil pouvait faire. Le matériel s'est amélioré progressivement, mais le logiciel a considérablement élargi les capacités. Fabric semble explorer quelque chose de similaire pour la robotique. Au sein de l'écosystème, chaque robot porte un identifiant numérique appelé RID, ou Identité Robot. Cette identité permet au réseau de suivre quelle machine a effectué quelle tâche. Elle permet également au système d'évaluer la fiabilité dans le temps. Un robot qui effectue constamment un travail vérifié construit une histoire. Cette histoire aide le réseau à assigner les tâches futures de manière plus intelligente. L'identité devient mémoire. La mémoire devient réputation. Combinez cela avec des mises à niveau de compétences modulaires, et vous commencez à voir le contour d'un écosystème de machines décentralisé. Les développeurs construisent des capacités. Les robots adoptent ces capacités. Le réseau vérifie le travail. Les incitations circulent via ROBO. En théorie, le système se développe de manière organique. Maintenant, imaginez un scénario simple. Une entreprise de logistique déploie des robots d'inspection autonomes à l'intérieur de grandes installations industrielles. Au départ, ces machines ne peuvent effectuer qu'un scan visuel. Au fil du temps, les développeurs publient de nouveaux modules à travers l'écosystème. Un module améliore la détection d'objets. Un autre permet l'analyse de maintenance prédictive. Un autre permet la vérification sécurisée des tâches via le réseau Fabric. Sans remplacer le matériel, les robots deviennent plus capables chaque année. Cette possibilité explique pourquoi la robotique modulaire est devenue un sujet tendance dans les discussions de début 2026 autour des réseaux d'infrastructure physique décentralisés, souvent appelés DePIN. Les investisseurs et les développeurs explorent comment les incitations blockchain peuvent coordonner des machines réelles. Mais pour que ces machines restent utiles dans le temps, elles doivent s'adapter. Et l'adaptation nécessite un design modulaire. Bien sûr, aucune architecture ne vient sans risque. Les écosystèmes modulaires peuvent se fragmenter rapidement si les normes ne sont pas soigneusement maintenues. Différents développeurs pourraient produire des modules de compétence incompatibles. La sécurité devient une autre préoccupation. Un module mal conçu pourrait introduire un comportement défectueux dans des machines opérant dans des environnements critiques. Les couches de vérification doivent évoluer aux côtés du marché des capacités. Un autre défi est l'adoption. Un écosystème modulaire ne devient précieux que si les développeurs construisent réellement des modules et que les machines les adoptent. Sans la participation des bâtisseurs, même l'architecture la plus élégante reste théorique. C'est pourquoi j'aborde des projets comme Fabric avec curiosité plutôt qu'avec certitude. L'idée que les machines évoluent progressivement grâce à des mises à niveau coordonnées par le réseau est intellectuellement convaincante. Mais l'histoire de la technologie nous a appris quelque chose d'important. Les idées ne deviennent pas des infrastructures tant qu'elles ne survivent pas aux frictions du monde réel. Les développeurs doivent expérimenter. Les machines doivent effectuer de vraies tâches. Les réseaux doivent vérifier de vrais résultats. Jusqu'à ce que cela se produise, le système reste une expérience. Mais les expériences sont comment l'infrastructure commence. Et peut-être que la partie la plus intéressante de toute cette exploration est philosophique. Pendant des décennies, nous avons imaginé l'intelligence des machines arrivant comme un moment de percée unique. Un bond dramatique de l'automatisation simple à des systèmes entièrement autonomes. La réalité pourrait être plus silencieuse que cela. Les machines ne se réveilleront peut-être pas intelligentes un jour. Elles continuent simplement à apprendre des petites choses.
Les machines apprennent probablement par morceaux. Cette réalisation est venue en fouillant dans un concept circulant discrètement au sein des capacités robotiques modulaires de l'écosystème Fabric, parfois décrit dans des discussions entre développeurs comme une architecture basée sur les compétences. L'idée n'est pas de construire un robot parfait qui sache tout. Au lieu de cela, les machines acquièrent des capacités étape par étape. Un module à la fois. Une fonction à la fois. En 2026, ce concept attire l'attention dans les cercles de recherche en robotique liés aux réseaux d'infrastructure décentralisés. La documentation de Fabric laisse entendre un design modulaire où les machines peuvent adopter de nouveaux comportements sans remplacer l'ensemble du système matériel. Cela compte car le matériel de robotique évolue lentement. Le logiciel évolue beaucoup plus rapidement. Et les systèmes qui évoluent plus vite ont tendance à gagner. Au sein de l'architecture de Fabric, la couche de coordination tourne autour de quelque chose appelé Preuve de Travail Robotique. Le concept est simple à expliquer même si le système sous-jacent est complexe. Un robot effectue une tâche. Le réseau vérifie que la tâche a eu lieu. L'activité devient un enregistrement permanent sur la chaîne. Une fois vérifiée, le système peut distribuer des incitations via le token ROBO. La vérification crée une responsabilité. La responsabilité crée la confiance. Mais pour qu'un robot puisse effectuer différents types de tâches, il doit posséder les bonnes capacités. Navigation. Reconnaissance d'objets. Logique d'inspection. Coordination de livraison. Ces capacités n'arrivent que rarement d'un seul coup. Elles sont construites en couches. C'est là que la robotique modulaire entre en jeu. Au lieu de remplacer les machines chaque fois que la technologie s'améliore, le réseau peut permettre aux robots d'adopter de nouvelles "compétences". Un robot d'entrepôt pourrait commencer par un mouvement et une cartographie de base. Plus tard, il reçoit un module de vision qui lui permet de scanner les étagères d'inventaire. Encore plus tard, il pourrait adopter un module de routage prédictif qui optimise le trafic dans l'entrepôt. La machine évolue par des mises à niveau plutôt que par remplacement. Hmmm… plus j'y pense, plus cela ressemble à l'évolution des smartphones. Les premiers téléphones étaient limités. Puis des écosystèmes d'application sont apparus. Les développeurs ont construit des logiciels qui étendaient ce que l'appareil pouvait faire. Le matériel s'est amélioré progressivement, mais le logiciel a considérablement élargi les capacités. Fabric semble explorer quelque chose de similaire pour la robotique. Au sein de l'écosystème, chaque robot porte un identifiant numérique appelé RID, ou Identité Robot. Cette identité permet au réseau de suivre quelle machine a effectué quelle tâche. Elle permet également au système d'évaluer la fiabilité dans le temps. Un robot qui effectue constamment un travail vérifié construit une histoire. Cette histoire aide le réseau à assigner les tâches futures de manière plus intelligente. L'identité devient mémoire. La mémoire devient réputation. Combinez cela avec des mises à niveau de compétences modulaires, et vous commencez à voir le contour d'un écosystème de machines décentralisé. Les développeurs construisent des capacités. Les robots adoptent ces capacités. Le réseau vérifie le travail. Les incitations circulent via ROBO. En théorie, le système se développe de manière organique. Maintenant, imaginez un scénario simple. Une entreprise de logistique déploie des robots d'inspection autonomes à l'intérieur de grandes installations industrielles. Au départ, ces machines ne peuvent effectuer qu'un scan visuel. Au fil du temps, les développeurs publient de nouveaux modules à travers l'écosystème. Un module améliore la détection d'objets. Un autre permet l'analyse de maintenance prédictive. Un autre permet la vérification sécurisée des tâches via le réseau Fabric. Sans remplacer le matériel, les robots deviennent plus capables chaque année. Cette possibilité explique pourquoi la robotique modulaire est devenue un sujet tendance dans les discussions de début 2026 autour des réseaux d'infrastructure physique décentralisés, souvent appelés DePIN. Les investisseurs et les développeurs explorent comment les incitations blockchain peuvent coordonner des machines réelles. Mais pour que ces machines restent utiles dans le temps, elles doivent s'adapter. Et l'adaptation nécessite un design modulaire. Bien sûr, aucune architecture ne vient sans risque. Les écosystèmes modulaires peuvent se fragmenter rapidement si les normes ne sont pas soigneusement maintenues. Différents développeurs pourraient produire des modules de compétence incompatibles. La sécurité devient une autre préoccupation. Un module mal conçu pourrait introduire un comportement défectueux dans des machines opérant dans des environnements critiques. Les couches de vérification doivent évoluer aux côtés du marché des capacités. Un autre défi est l'adoption. Un écosystème modulaire ne devient précieux que si les développeurs construisent réellement des modules et que les machines les adoptent. Sans la participation des bâtisseurs, même l'architecture la plus élégante reste théorique. C'est pourquoi j'aborde des projets comme Fabric avec curiosité plutôt qu'avec certitude. L'idée que les machines évoluent progressivement grâce à des mises à niveau coordonnées par le réseau est intellectuellement convaincante. Mais l'histoire de la technologie nous a appris quelque chose d'important. Les idées ne deviennent pas des infrastructures tant qu'elles ne survivent pas aux frictions du monde réel. Les développeurs doivent expérimenter. Les machines doivent effectuer de vraies tâches. Les réseaux doivent vérifier de vrais résultats. Jusqu'à ce que cela se produise, le système reste une expérience. Mais les expériences sont comment l'infrastructure commence. Et peut-être que la partie la plus intéressante de toute cette exploration est philosophique. Pendant des décennies, nous avons imaginé l'intelligence des machines arrivant comme un moment de percée unique. Un bond dramatique de l'automatisation simple à des systèmes entièrement autonomes. La réalité pourrait être plus silencieuse que cela. Les machines ne se réveilleront peut-être pas intelligentes un jour. Elles continuent simplement à apprendre des petites choses.
Une mise à niveau à la fois.
@Fabric Foundation #ROBO $ROBO