What caught my attention first was a simple question: if robots are going to work across real businesses, warehouses, streets, and service environments, what kind of infrastructure do they actually need to operate safely, productively, and economically at scale?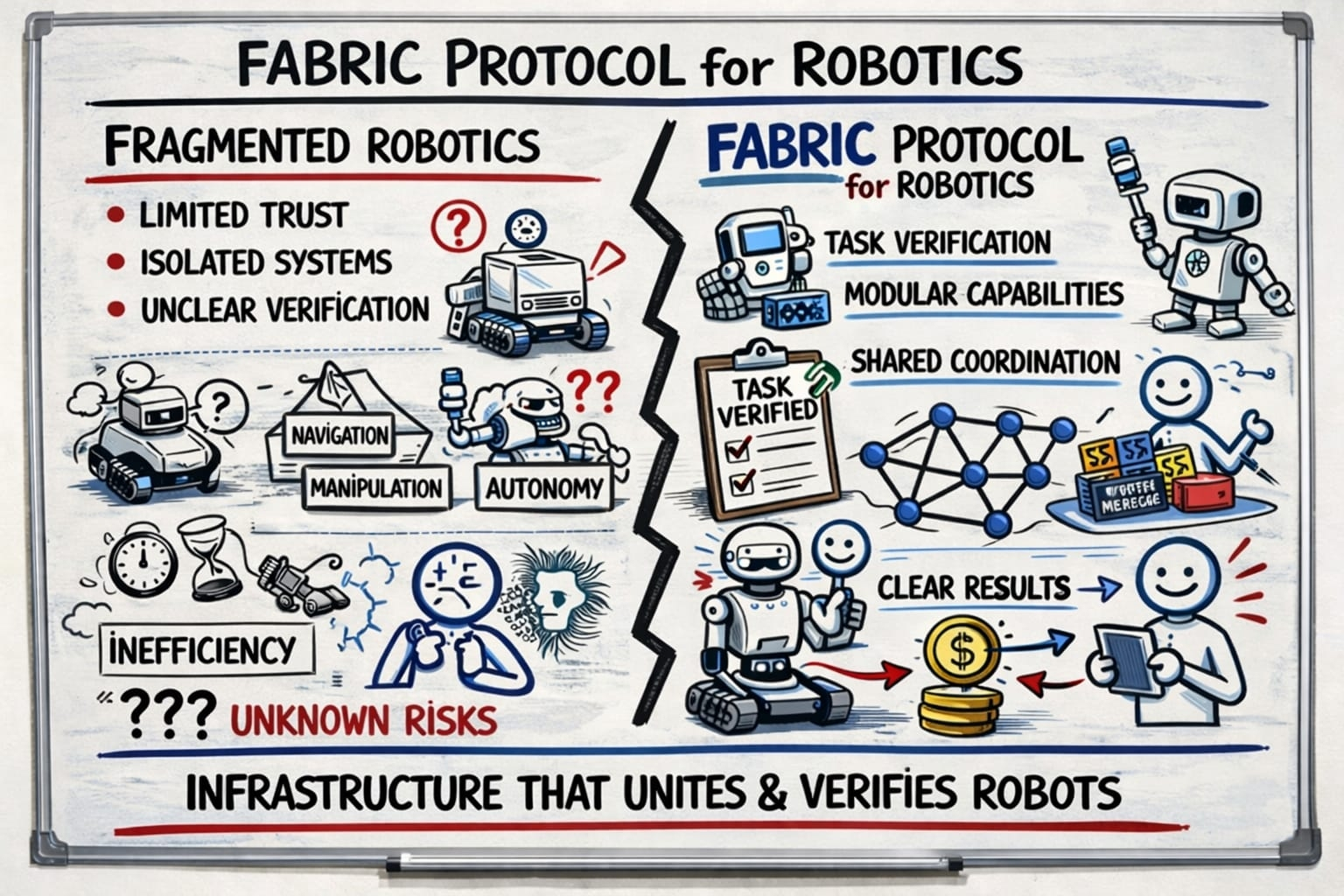
I do not think the answer is just better hardware or smarter AI.
That part feels obvious at first, but the more I think about robotics, the more it seems like intelligence is only one layer of the problem. A machine can become more capable and still be hard to trust, hard to coordinate, and hard to fit into a real operating environment where performance, responsibility, and value all have to be clear.
That is why Fabric Protocol stands out to me.
I picture something practical, like delivery robots moving through a dense commercial district, or warehouse systems working across several facilities with different schedules, workflows, and service demands.
In that setting, the real challenge is not only whether the robot can perform the task.
The harder question is whether the system around it can verify what was done, measure the quality of execution, coordinate multiple participants, and create enough trust for businesses to depend on those machines as part of real operations rather than controlled demonstrations. That is where robotics still feels incomplete to me. The machines are improving fast, but the infrastructure around them still looks fragmented.
And that fragmentation matters.
A lot of robotics progress still feels isolated. One company solves for navigation. Another improves manipulation. Another focuses on perception or autonomy. But once these systems have to operate inside a wider economy, the missing piece becomes much more obvious. Robots do not just need to act intelligently. They need ways to coordinate, validate performance, exchange value, use trusted capabilities, and operate inside systems where accountability is not vague.
That is where Fabric starts to make sense.
In practical terms, I do not see Fabric Protocol as just another abstract crypto concept attached to robotics. I see it more as an attempt to build the coordination layer that a real robot economy would need. Not just a framework for machines doing tasks, but a system for machines operating with verification, safety, accountable execution, and economic logic that connects useful work to measurable outcomes.
To me, that is the more serious part of the idea.
The biggest barrier in robotics may not be intelligence alone. It may be trust and coordination. A robot can complete a task, but how is that task verified? A machine can claim reliability, but who proves that performance holds up over time? A service robot can create value, but how is uptime, service quality, and execution measured in a way that operators and businesses can actually rely on?
Those are infrastructure questions.
And infrastructure questions tend to decide whether technology stays impressive or becomes usable at scale. That is why I think Fabric matters more when it is understood as infrastructure, not just as a tokenized layer. If robotics is moving toward a machine economy, then machines will need shared systems for validation, capability management, incentive alignment, and trusted coordination across different environments and operators.
Otherwise everything stays siloed.
A simple analogy helps me think about it. Smartphones did not become widely transformative just because the hardware improved. They became far more useful once app stores, payment rails, identity layers, and trusted software distribution gave them a broader operating system around the device itself.
I think robotics may need something similar.
Not the same architecture, obviously, but the same principle. Shared infrastructure matters because it reduces friction. It makes coordination easier. It makes trust more practical. It lets different participants work inside the same system without rebuilding the whole stack every time a new use case appears. That logic feels especially important in robotics because deployment conditions change constantly.
This is also why modularity matters so much to me.
Robots may need portable or installable capabilities rather than full redesigns every time they are assigned a new task. Real businesses do not operate in fixed conditions. Workflows change. Physical environments change. Service expectations change. If every new function requires rebuilding the whole system, robotics stays expensive and rigid. But if capabilities can be added, validated, and used more flexibly across machines, then the model becomes much more practical.
That starts to look like real infrastructure.
The coordination challenge also becomes bigger as robotics scales. It is not only machine-to-machine coordination, though that matters. It is machine-to-human coordination as well. Operators, service providers, clients, and automated systems all need some shared understanding of what work was done, whether it met expected standards, and who is responsible when something fails.
That is not a minor detail in robotics.
In digital systems, weak execution may create financial loss or software failure. In robotics, weak execution can also create physical disruption, damaged goods, downtime, unsafe movement, or direct operational costs. That means safety and accountability have to sit close to the center of the design. They cannot just be optional promises added after the system becomes more capable.
That is one reason Fabric feels relevant.
The economic side matters too. A robot economy cannot rely on vague narratives about participation or innovation. It has to connect incentives to work that is actually useful, measurable, and reliable. Uptime matters. Service quality matters. Verified performance matters. Trusted execution matters. If those things are not legible, then the economic layer becomes detached from the real work being done.
And then the model weakens.
Still, I do not think the risks should be ignored. Ambitious infrastructure only matters if builders, operators, and enterprises can actually use it. Complexity could slow adoption. Verification may sound strong in theory, but real-world performance is often hard to measure cleanly. Operators may resist systems that are difficult to integrate. Enterprises may hesitate if accountability still feels abstract or if trust depends on assumptions rather than evidence.
That is the honest limit of the idea.
So when I think about Fabric Protocol, I do not see the strongest case as futuristic language around robot economies. I see a narrower and more grounded possibility. Robotics may be reaching the point where hardware progress and better AI are no longer the only constraints. The harder challenge may be building the infrastructure that lets machines coordinate, prove performance, carry trusted capabilities, and fit into economic systems that real businesses can rely on.
If Fabric is trying to build that layer, then it may be addressing one of the more important gaps in robotics.
The question is whether that coordination layer can become simple, measurable, and trusted enough to matter before robotics scales faster than the infrastructure around it.
@Fabric Foundation #ROBO #robo