
@Fabric Foundation . Je me souviens d'avoir vu un robot d'entrepôt glisser dans une allée, une fois en train de ramasser, de scanner, d'ajuster son itinéraire sans hésitation. Le mouvement était presque élégant. Mais le système derrière était moins impressionnant une fois que vous regardiez de plus près. Un tableau de bord fermé. Une logique de routage propriétaire. Chaque commande se retrouve finalement retracée à l'infrastructure d'une seule entreprise.
Ce schéma apparaît partout dans la robotique.
Les machines qui semblent autonomes en surface fonctionnent généralement dans des environnements logiciels étroitement contrôlés. L'intelligence peut être distribuée entre des capteurs et des modèles, mais l'autorité derrière le système reste centralisée.
Ce qui soulève une question différente : que se passe-t-il lorsque les robots eux-mêmes opèrent à l'intérieur de réseaux ouverts plutôt que de systèmes d'entreprise fermés ?
C'est la direction que la Fabric Foundation explore à travers le Fabric Protocol—une couche d'infrastructure conçue pour coordonner des machines intelligentes utilisant une computation vérifiable et une architecture native des agents. L'idée est assez radicale si vous la suivez jusqu'au bout : des robots, des agents IA et des humains interagissant tous à travers un protocole partagé où l'identité, les tâches et les résultats peuvent être vérifiés sans s'appuyer sur un opérateur central.
Que cette architecture fonctionne réellement à grande échelle reste encore une question ouverte. Mais la direction elle-même signale quelque chose d'important. La robotique, l'IA et l'infrastructure décentralisée commencent à converger d'une manière qui semble moins théorique qu'elle ne l'était encore il y a quelques années.
Fondations Architecturales
La plupart des systèmes robotiques aujourd'hui sont conçus comme des piles verticales. Matériel en bas, couches de contrôle logiciel au-dessus, et orchestration centralisée en haut.
Le Fabric Protocol aborde le problème différemment. Au lieu de construire une plateforme robotique fermée, il essaie de créer une couche de coordination où les machines peuvent interagir à travers une infrastructure partagée.
Deux composants apparaissent immédiatement dans la conception : l'identité et la vérification. Une troisième couche—la coordination—émerge presque comme le tissu conjonctif entre elles.
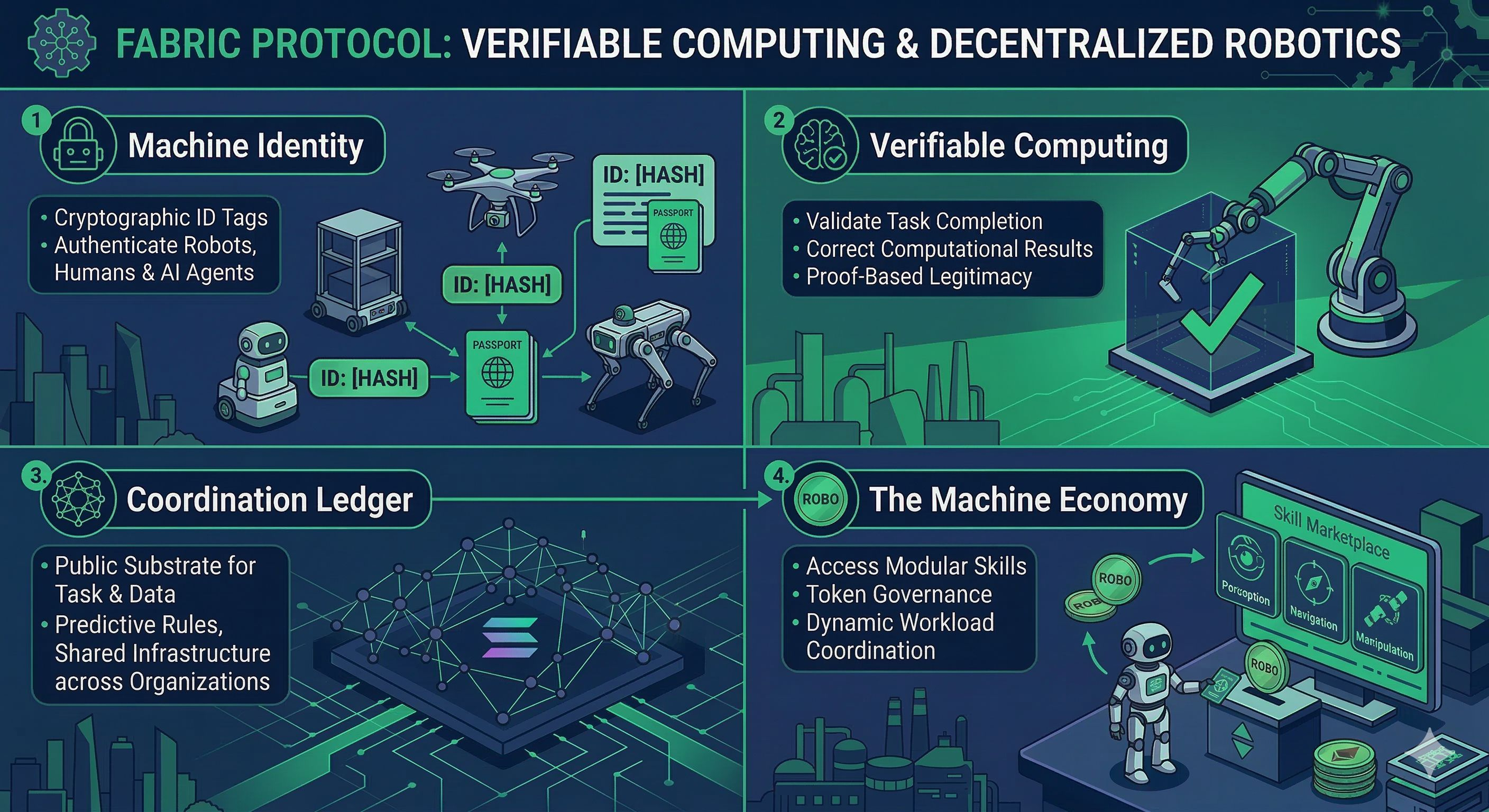
Identité de la Machine
Chaque participant du réseau reçoit une identité cryptographique enregistrée sur un registre public.
Cela inclut les humains, les agents IA et les robots physiques.
L'effet semble simple, mais il change la façon dont les machines interagissent avec les systèmes qui les entourent. Un robot peut s'authentifier sur le réseau. Les tâches peuvent être attribuées à des machines spécifiques. Et dans certains cas, les machines elles-mêmes peuvent exécuter des transactions liées à leur identité.
Au lieu d'exister comme des points d'extrémité matériels anonymes, les robots commencent à se comporter davantage comme des nœuds à l'intérieur d'un système distribué.
Calcul Vérifiable
La couche la plus intéressante, cependant, est le Calcul Vérifiable.
Dans des environnements décentralisés, la confiance devient rapidement un problème. Si un robot affirme avoir terminé une tâche—ou un modèle d'IA prétend avoir produit un résultat—comment le reste du réseau sait-il que cette affirmation est légitime ?
Fabric aborde cela par le biais de mécanismes de vérification cryptographique qui permettent aux résultats computationnels d'être prouvés plutôt que simplement rapportés.
Cette couche de preuve peut valider plusieurs choses :
qu'une tâche robotique a effectivement eu lieu
qu'un résultat computationnel a été généré correctement
qu'un agent a suivi des règles d'exécution spécifiques
Au lieu de s'appuyer sur des systèmes de surveillance centralisés, le réseau lui-même devient le cadre de vérification.
Registre de Coordination
L'identité et la vérification à elles seules ne créent pas un système fonctionnel. Les machines ont encore besoin d'un environnement partagé où les tâches, les résultats et l'activité économique peuvent être enregistrés.
C'est ici que la couche de coordination apparaît.
Le protocole maintient un registre public où l'activité du réseau est ancrée. Les affectations de tâches, les actions des machines, les preuves de vérification et les paiements circulent tous à travers cette couche. Il fonctionne moins comme un registre blockchain traditionnel et plus comme un substrat de coordination—un environnement où plusieurs types d'agents peuvent interagir avec des règles prévisibles.
Infrastructure Native des Agents
La plupart des plateformes numériques supposent qu'il y a un humain quelque part derrière le clavier.
Fabric ne le fait pas.
L'infrastructure est conçue avec l'attente que des agents autonomes—systèmes logiciels et machines—interagiront directement les uns avec les autres.
Cela change la façon dont les réseaux doivent se comporter.
La communication machine-à-machine devient routinière. Les agents découvrent des tâches sans intervention humaine. Les transactions peuvent se produire automatiquement lorsque le travail est terminé. Le système commence à ressembler à quelque chose de plus proche d'un marché du travail automatisé qu'à une plateforme logicielle traditionnelle.
Il n'est pas difficile d'imaginer comment cela évolue. Une fois que les machines peuvent s'authentifier, vérifier leur travail et conclure des transactions, les ingrédients de base d'une économie de machines commencent à apparaître presque naturellement.
Cognition Modulaire et Couches de Compétences
Une autre décision intéressante dans l'architecture est la façon dont l'intelligence est structurée.
Au lieu d'incorporer un modèle d'IA massif dans chaque robot, le système encourage des couches de cognition modulaires. Les robots peuvent puiser dans plusieurs modules de capacité—modèles de perception, systèmes de navigation, couches de raisonnement, et éventuellement compétences de manipulation.
Ces modules fonctionnent presque comme des extensions logicielles.
Les développeurs peuvent les améliorer de manière indépendante. De nouvelles capacités peuvent être introduites sans reconstruire des machines entières. Au fil du temps, l'écosystème pourrait commencer à ressembler à un marché pour les capacités robotiques, où des algorithmes spécialisés deviennent une infrastructure partagée à travers le réseau.
C'est un choix de conception subtil, mais qui s'aligne bien avec les modèles de développement décentralisés.
L'économie des jetons ROBO
La coordination économique au sein de l'écosystème est facilitée par le jeton natif du réseau, ROBO.
La plupart des jetons dans cette industrie finissent par se comporter comme des actifs spéculatifs. Fabric tente quelque chose d'un peu différent en liant le jeton directement à des fonctions opérationnelles au sein du réseau.
Les robots et les agents utilisent le jeton pour accéder à des services tels que la vérification, l'enregistrement d'identité et la coordination computationnelle.
Le jeton joue également un rôle dans la gouvernance. Les participants peuvent voter sur les mises à jour de protocole, les paramètres d'infrastructure et les ajustements de politique. En théorie, cela distribue la prise de décision à travers l'écosystème plutôt que de la concentrer au sein d'une seule organisation.
Que la gouvernance fonctionne sans accroc dans des systèmes coordonnant des machines physiques reste une question ouverte—mais le mécanisme essaie au moins d'aligner les incitations entre les développeurs, les fournisseurs d'infrastructure et les opérateurs.
Applications Potentielles
La logistique est le point de départ évident.
Les entrepôts, les systèmes de livraison et les flottes robotiques fonctionnent déjà avec une automatisation significative. Une couche de coordination décentralisée pourrait permettre à ces systèmes d'interagir à travers les organisations plutôt que de rester enfermés dans des plateformes propriétaires.
L'automatisation industrielle suivrait probablement. Les usines déployant des flottes de machines pourraient coordonner les charges de travail dynamiquement en fonction de la demande à travers des réseaux partagés.
La maintenance de l'infrastructure est moins évidente mais potentiellement plus importante. Des systèmes autonomes responsables de l'inspection des pipelines, de la maintenance des réseaux électriques ou de la surveillance des conditions environnementales pourraient fonctionner sous une coordination décentralisée.
Et puis il y a des marchés de services—des robots effectuant des tâches de nettoyage, d'inspection, de sécurité ou de livraison qui découvrent de manière autonome du travail à travers des marchés numériques.
Dans chaque cas, les machines cessent de se comporter comme du matériel statique. Elles commencent à ressembler davantage à des acteurs économiques participant à des réseaux.
Défis et Questions Ouvertes
Bien sûr, la robotique introduit des complications que les systèmes blockchain purement numériques rencontrent rarement.
La fiabilité du matériel est importante. La sécurité physique est encore plus cruciale. Un serveur compromis peut causer une perte de données ; un robot compromis pourrait causer des dommages dans le monde réel.
La sécurité devient donc plus complexe. Les vulnérabilités du réseau ne sont plus seulement des problèmes logiciels.
L'évolutivité est une autre préoccupation. Coordonner des milliers—sans parler de millions—de machines autonomes à travers une infrastructure décentralisée nécessitera des systèmes de vérification extrêmement efficaces.
Il n'est également pas clair comment les cadres réglementaires évolueront autour des économies de machines. Les systèmes juridiques peinent encore à définir la responsabilité lorsque les systèmes autonomes prennent des décisions.
Tous ces problèmes se situent juste sous la surface de l'architecture.
L'Économie des Machines Émergentes
Pendant des années, les systèmes blockchain se sont concentrés presque entièrement sur la coordination financière—jetons, paiements, échanges décentralisés.
Mais à mesure que les modèles d'IA s'améliorent et que la robotique continue d'avancer, une nouvelle frontière commence à apparaître.
Des réseaux qui coordonnent un travail physique.
C'est là que le Fabric Protocol devient intéressant. Pas nécessairement parce que chaque partie de la vision réussira, mais parce qu'il tente de connecter plusieurs tendances technologiques qui se dirigent vers les autres de toute façon : agents intelligents, machines autonomes et infrastructure décentralisée.
Si des systèmes comme celui-ci fonctionnent un jour à grande échelle, les implications commencent à s'étendre bien au-delà de la crypto.
Parce qu'à ce moment-là, le réseau ne se contente pas de coordonner des données ou des actifs.
Il coordonne des machines.
