The robotics industry is approaching a critical architectural decision point that will determine whether general-purpose robots become infrastructure that serves the broader public interest or whether they become proprietary systems controlled by a small number of companies optimizing for objectives that may not align with safety, transparency, or collaborative evolution. Most robotics platforms being built today are following the same closed infrastructure model that dominated earlier technology waves, where a company builds a proprietary stack, attracts users through features and marketing, and then leverages the resulting lock-in to extract value from an ecosystem that has limited alternatives. @Fabric Foundation was designed from the beginning to prove that a different model is possible, and more importantly, that the different model is the only model that makes general-purpose robotics safe and sustainable at the scale that matters.
The problem with closed infrastructure in robotics is not primarily about business model preferences or philosophical commitments to openness for its own sake. The problem is structural, and it becomes visible when you examine what happens as robots move from controlled environments where their behavior can be tightly specified to general-purpose environments where they need to make decisions in contexts that were not anticipated by their designers. In a closed system, when a robot encounters an edge case or a safety concern that was not addressed in the original design, the only entity that can respond is the company that controls the infrastructure, and that company's response is constrained by its own incentives, resources, and priorities rather than by what would be optimal for the ecosystem as a whole.
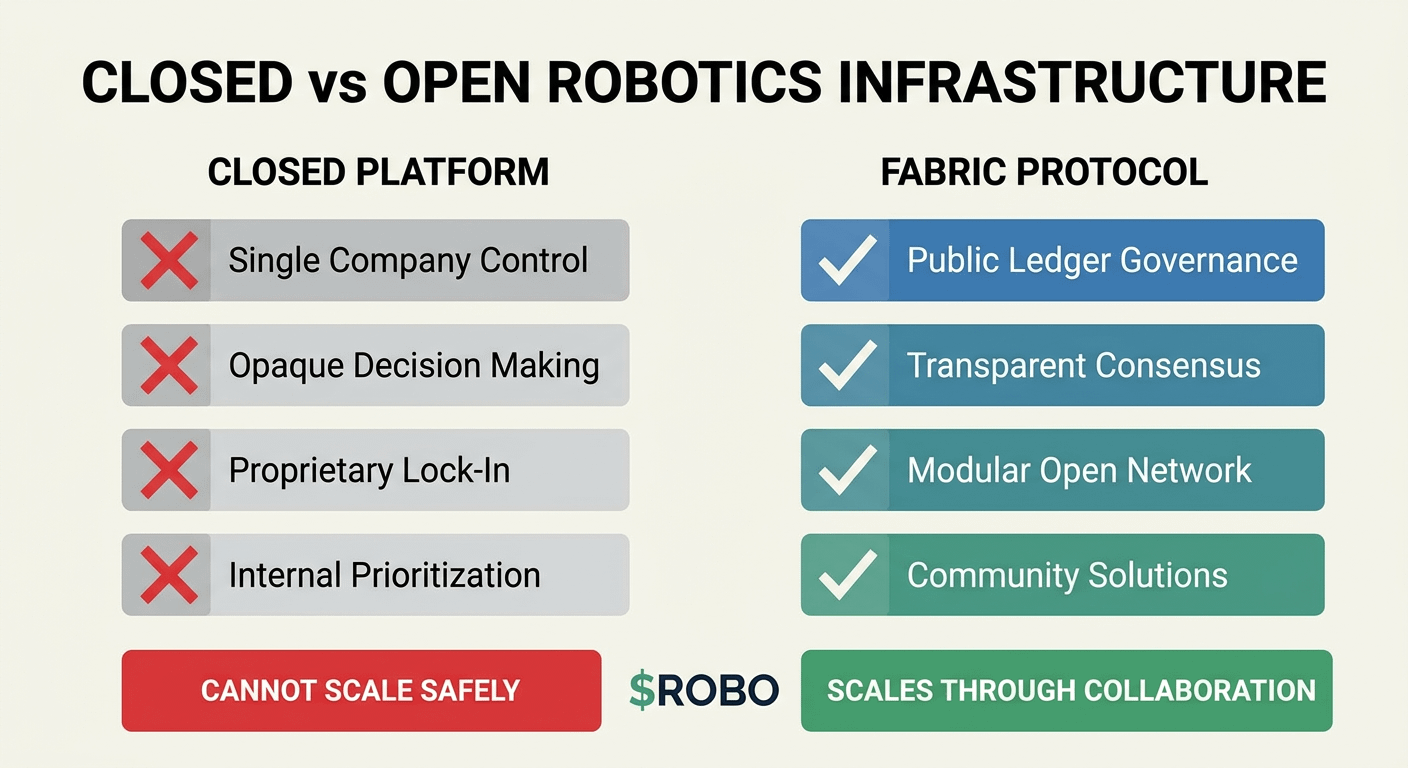
Consider what this means in practice for something as basic as safety updates. When a safety issue is discovered in a closed robotics platform, the timeline for deploying a fix is determined by the company's internal prioritization process, which balances safety concerns against other business objectives like feature development, customer acquisition, and cost management. If the company decides that the safety issue affects only a small number of deployments or that addressing it would require significant engineering resources that could be deployed elsewhere, the fix may be delayed or deprioritized in ways that would not happen in an open system where the broader community can contribute solutions and where governance decisions are made transparently with input from all affected parties.
$ROBO changes this dynamic by coordinating robot development and governance through a public ledger where data, computation, and regulation are visible to the entire network rather than being controlled by a single entity. When a safety issue is identified, any participant in the network can propose a solution, any participant can verify that the solution works correctly, and the deployment of the solution happens through transparent consensus mechanisms rather than through opaque internal processes at a company that may have conflicting incentives. This does not mean that all safety issues are resolved instantly or that governance becomes frictionless, but it does mean that the incentive structure is aligned with safety and collaborative improvement rather than with protecting proprietary advantages.
The agent-native infrastructure that @Fabric Foundation built recognizes that robots are not just software applications that can be managed using the same tools and assumptions that work for web services or mobile apps. Robots are physical agents that interact with the real world, and the infrastructure that supports them needs to account for real-time performance requirements, for verification guarantees that ensure safe behavior even when network connectivity is intermittent, and for coordination mechanisms that work when agents are distributed across geographic space and need to make decisions based on incomplete information about what other agents are doing.
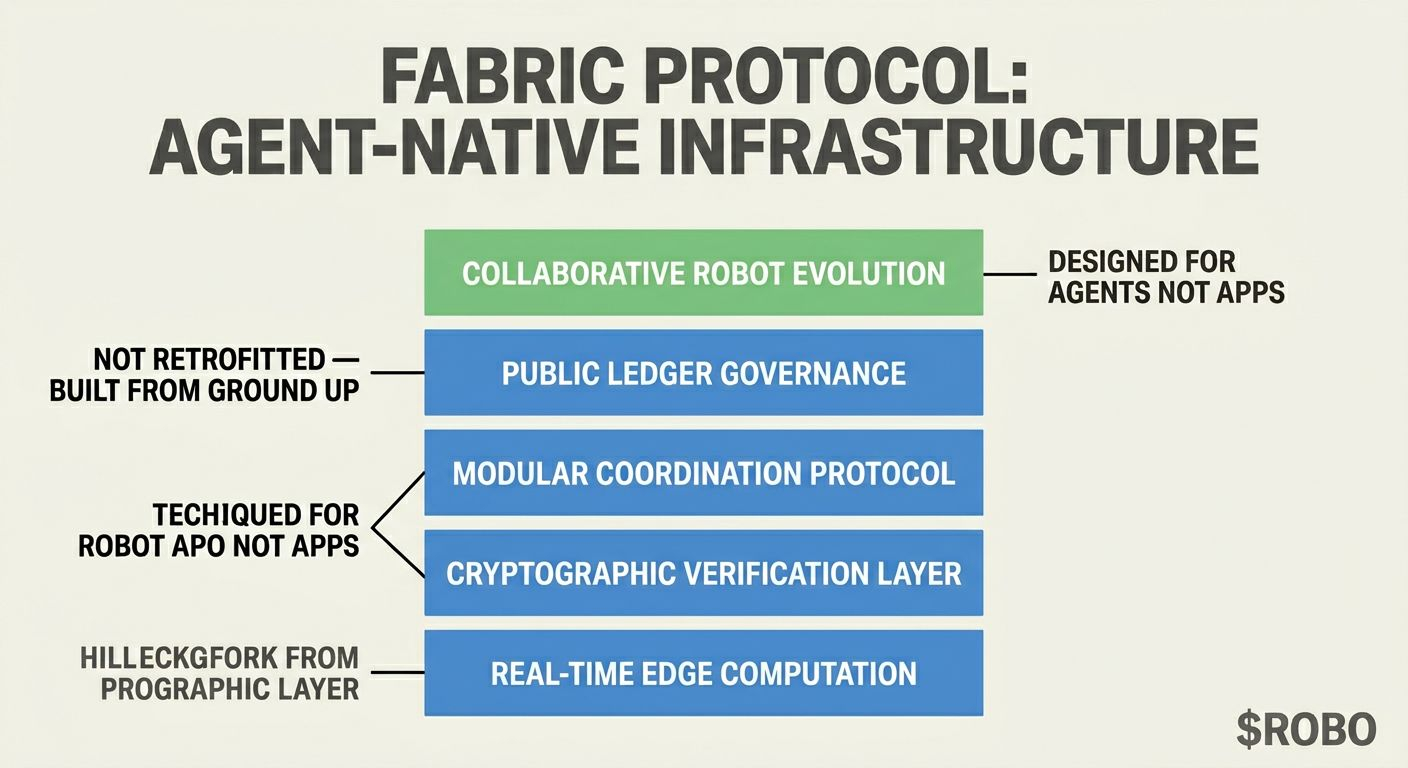
Building this infrastructure on legacy cloud systems designed for different use cases creates architectural mismatches that show up as latency problems when real-time decisions are required, as verification problems when cryptographic proofs need to be generated and validated at the edge rather than in a centralized data center, and as coordination problems when agents need to reach consensus about shared state without relying on a central authority that could become a bottleneck or a single point of failure. Agent-native infrastructure is designed from the beginning to support these requirements rather than trying to retrofit them onto systems that made different foundational assumptions.
The modular coordination approach that Fabric Protocol implements is particularly important for enabling the kind of collaborative evolution that general-purpose robotics requires as understanding of safety and capability improves over time. In closed systems, modularity is limited to whatever extension points the controlling company chose to expose, and those extension points are typically designed to protect the company's core proprietary advantages rather than to maximize the ecosystem's ability to innovate. In an open network coordinated through a public ledger, modularity is enforced at the protocol level, which means that any component can be replaced or upgraded as long as it maintains compatibility with the interfaces that other components depend on, and the decision about whether to adopt a new component is made by the network through transparent governance rather than by a company through internal prioritization.
This architectural difference becomes increasingly important as the complexity and capability of robotic systems increases, because increased complexity means increased surface area for safety issues, performance bottlenecks, and coordination failures, and the only sustainable way to manage that complexity at scale is through a system where the entire network can contribute solutions rather than relying on a single company's engineering resources to address every problem. The companies building closed robotics platforms today will eventually discover that they cannot scale their internal teams fast enough to keep pace with the rate at which new safety issues and coordination challenges emerge in general-purpose deployments, and by the time they discover this limitation, the cost of migrating to an open architecture will be prohibitively high because of the lock-in dynamics they have created.
What differentiates @Fabric Foundation from other projects claiming to offer open robotics infrastructure is the specificity of the architectural choices and the degree to which those choices were made with long-term sustainability and collaborative evolution as primary design constraints rather than as marketing talking points. This is not a project that took an existing closed platform and added some open-source components or blockchain integration and declared the openness problem solved. This is infrastructure that was designed from the beginning around the recognition that general-purpose robotics requires fundamentally different governance and coordination mechanisms than the closed platforms that work adequately for controlled industrial use cases.
The public ledger that coordinates data, computation, and regulation in Fabric Protocol is not a feature that could be added to closed systems without changing their fundamental power dynamics. It is the foundation on which everything else is built, and it creates a system where trust comes from verification rather than from reputation, where governance happens through transparent consensus rather than through opaque internal processes, and where innovation can come from any participant rather than being controlled by a single entity that may have incentives that conflict with the ecosystem's long-term health.
The honest acknowledgment that makes this analysis credible rather than promotional is that having the correct architecture for sustainable general-purpose robotics does not automatically translate into market adoption, because adoption is determined by factors beyond technical correctness. Network effects matter, and closed platforms with large existing user bases and significant marketing budgets can maintain dominance even when their architectural foundations are less suitable for long-term ecosystem health. Developer familiarity matters, because most teams building robotics systems today are using tools and frameworks that were designed for closed platform assumptions, and switching to an open architecture requires learning new patterns and accepting short-term development friction in exchange for long-term sustainability benefits.
What makes the open infrastructure bet credible despite these adoption challenges is that the problems with closed robotics platforms will become increasingly visible as deployment scale increases and as the consequences of proprietary control become more apparent to builders, users, and regulators. The safety incidents that could have been prevented with faster community response will accumulate. The innovation that was blocked by platform gatekeepers will become visible as missed opportunities. The lock-in costs that developers pay to remain on platforms that do not serve their long-term interests will become too high to ignore.
When those costs become undeniable, the migration to open infrastructure will not be a choice motivated by philosophical preference or technical elegance. It will be a practical necessity driven by the recognition that closed platforms cannot deliver the safety, transparency, and collaborative evolution that general-purpose robotics requires at scale. $ROBO represents the clearest articulation of what that open infrastructure looks like in practice, and whether it becomes the foundation for the next generation of robotics development or remains a technically superior alternative that never achieved mass adoption will be determined by whether the market recognizes the limitations of closed platforms before the cost of migration becomes prohibitively high.
The robotics systems that will define the next decade are being architected right now. The choice between closed infrastructure optimized for proprietary control and open infrastructure designed for collaborative evolution is a choice that cannot be reversed easily once network effects establish themselves. @Fabric Foundation built the infrastructure for the second path, and the builders who choose to deploy on that infrastructure today are making a bet that sustainability and openness will matter more in the long run than the short-term conveniences that closed platforms offer through their proprietary advantages.
#ROBO @Fabric Foundation $ROBO
