I first came across Fabric Foundation while scanning through recent developments in the intersection of AI and blockchain. Honestly, I assumed it was just another ambitious project promising to revolutionize robotics with decentralized tech—plenty of those have come and gone without much lasting impact. But as I dug deeper into their structure, what shifted my view was the deliberate role of OpenMind in shaping the Foundation's trajectory. OpenMind isn't just a collaborator; they're the core architects behind the foundational tech, bringing a software-first mindset to a hardware-dominated field. This partnership revealed a thoughtful approach to building interoperable robot systems, one that prioritizes open-source principles over proprietary silos.
The robotics industry faces a persistent hurdle: machines from different manufacturers rarely "talk" to each other effectively, leading to fragmented deployments. Imagine a warehouse where one company's humanoid robot handles inventory while another's manages delivery—without seamless coordination, efficiency plummets, and scaling becomes a nightmare. This mirrors broader Web3 challenges like AI integration and modular design, where decentralized systems struggle with trust and interoperability. In a world pushing toward autonomous agents, the lack of a shared layer for verification and collaboration stifles progress, much like early blockchains without standardized protocols.
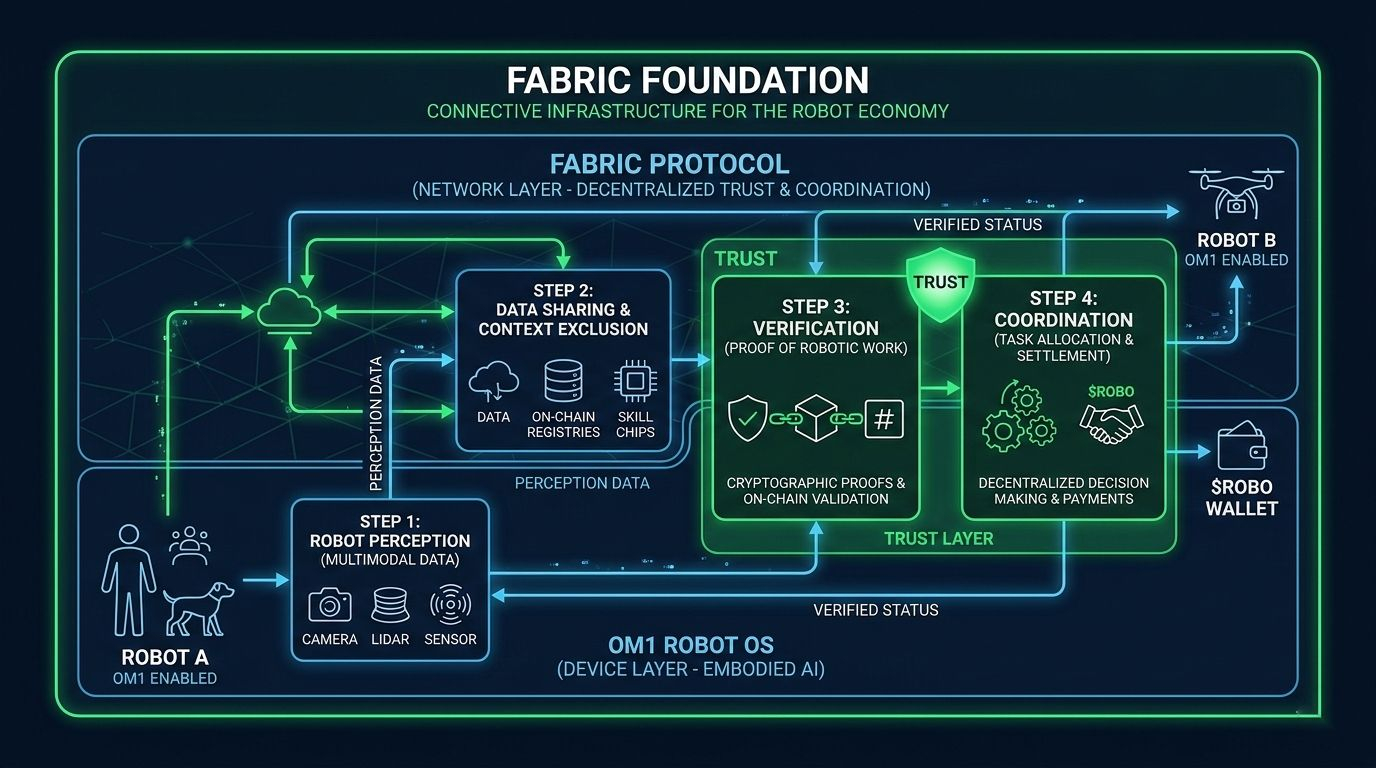
Fabric Foundation tackles this by leveraging OpenMind's innovations to create a decentralized network for robots. At its core is OM1, OpenMind's open-source operating system, which runs across various robot hardware, enabling machines to perceive environments, adapt behaviors, and execute tasks intelligently. Complementing this is FABRIC, a protocol developed by OpenMind that acts as a coordination layer. It allows robots to verify identities, share contextual data, and settle transactions via blockchain ledgers—essentially turning isolated devices into a collaborative swarm. The Foundation oversees this ecosystem, ensuring governance remains neutral and focused on long-term utility rather than short-term gains.
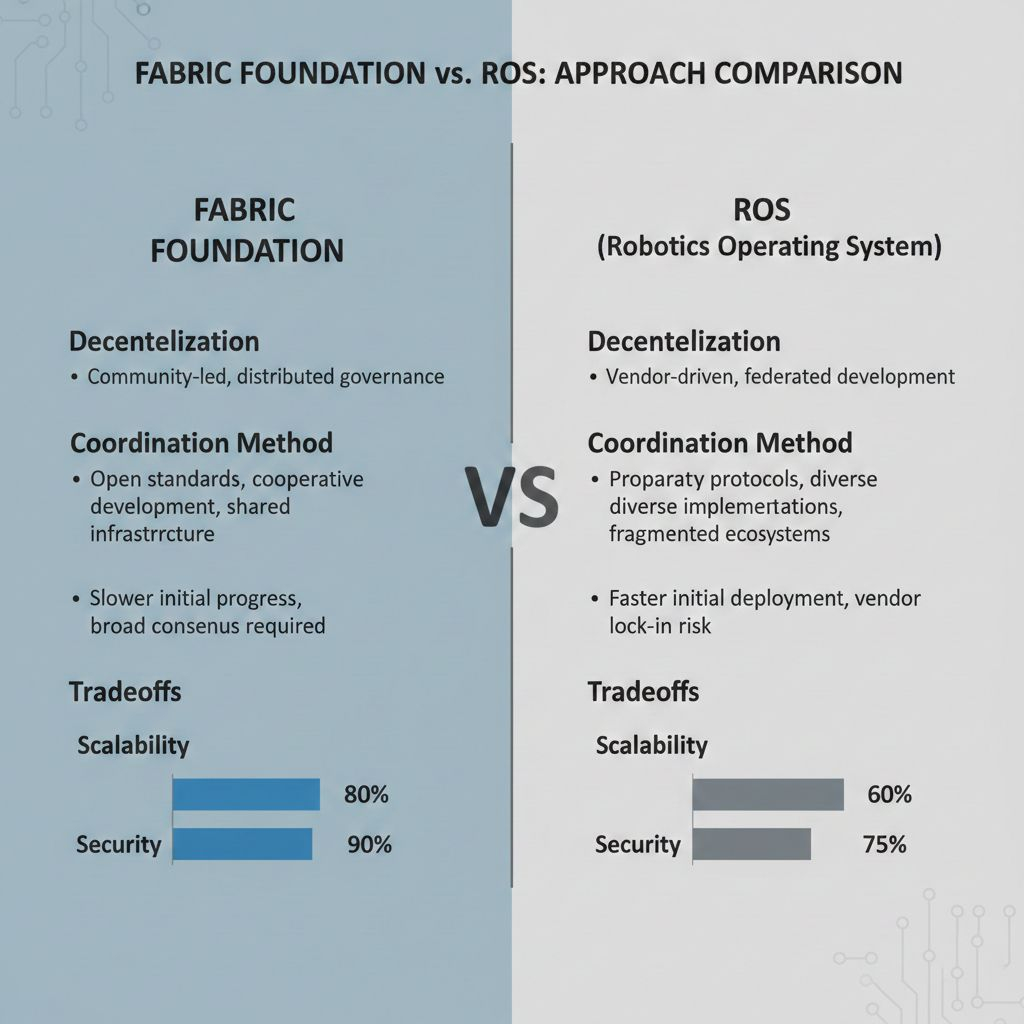
Compare this to the Robot Operating System (ROS), a widely used open-source framework that's great for individual robot development but lacks built-in decentralization. ROS relies on centralized servers for multi-robot coordination, which can introduce single points of failure and limit scalability in untrusted environments. Fabric's approach, via OpenMind's FABRIC, shifts incentives toward peer-to-peer verification, where robots earn rewards for contributing data or compute. This creates economic alignment but introduces tradeoffs like higher computational overhead for on-chain proofs compared to ROS's lighter footprint.
What stands out in my analysis is how OpenMind's involvement injects academic rigor into Fabric's design—founders with roots in Stanford and MIT emphasize verifiable AI behaviors over black-box models. This yields benefits like enhanced security in mixed-robot fleets, where machines can audit each other's actions in real-time. However, hidden costs lurk: the reliance on blockchain for coordination could amplify latency in time-sensitive tasks, and bootstrapping a network effect demands widespread hardware adoption, which isn't guaranteed in a fragmented market.
The space isn't without headwinds—regulatory scrutiny on AI autonomy grows, and integrating physical robots with digital ledgers risks unforeseen vulnerabilities, like sensor spoofing attacks. Yet, OpenMind's transparent contributions to Fabric Foundation matter profoundly for longevity. By open-sourcing core components, they lay groundwork for community-driven evolution, fostering resilience in an era where proprietary AI could concentrate power unevenly.
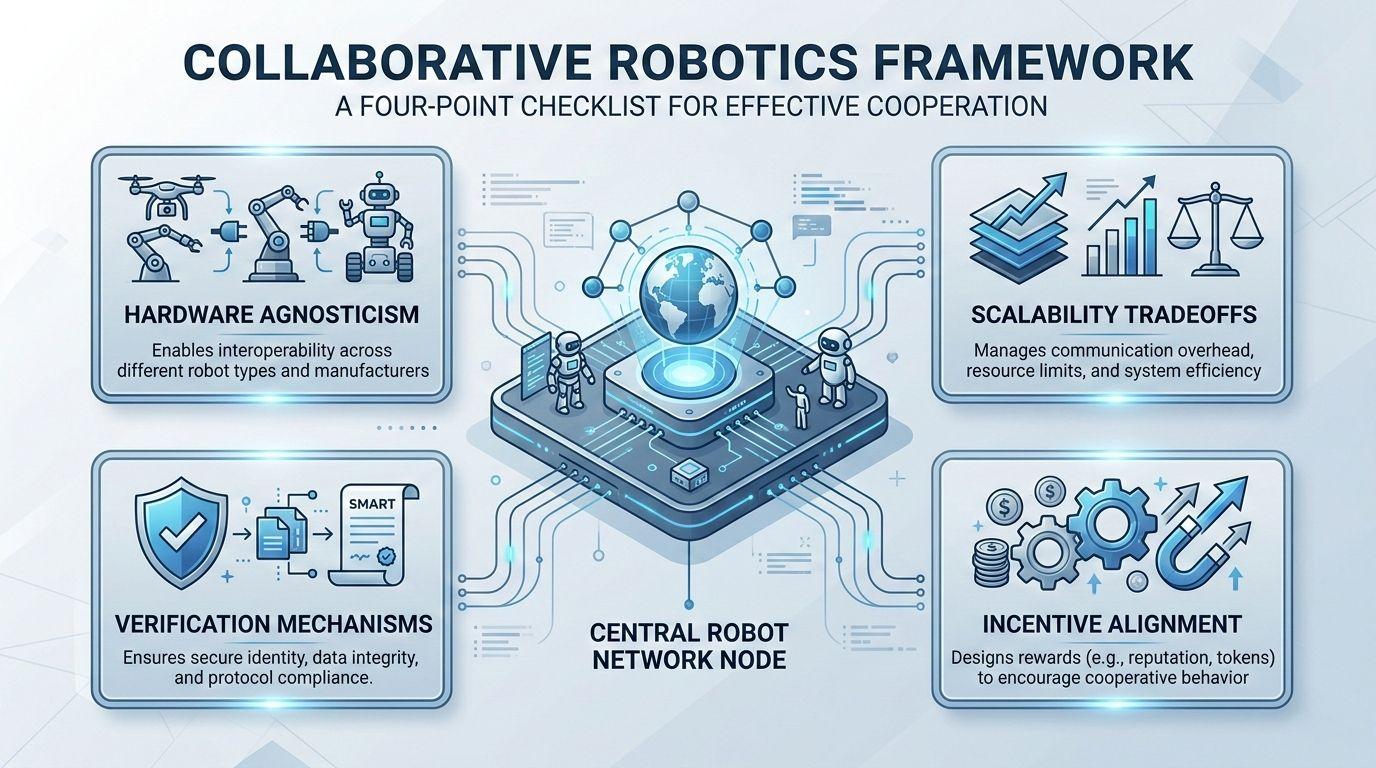
To help evaluate similar initiatives, I've coined the "Collaborative Robotics Framework"—a reusable model for assessing decentralized robot networks. Here's a four-point checklist: 1) Hardware Agnosticism: Does the system support multiple embodiments without vendor lock-in? 2) Verification Mechanisms: Are identity and data sharing secured through decentralized proofs? 3) Incentive Alignment: How do rewards encourage participation without central control? 4) Scalability Tradeoffs: What compromises exist in speed versus security, and are they transparently documented?
As we watch this unfold, one question lingers for those deep in the field: How might OpenMind's modular OS influence the standardization of robot ethics in decentralized economies?
@Fabric Foundation #Robo $ROBO