The Fabric Protocol whitepaper includes a specific numerical example that most readers will find either exciting or terrifying depending on their current occupation: 23,000 electrician robots, each costing between $3 to $12 per hour to operate, could perform all electrical work currently done by 73,000 unionized human electricians in California who earn $63.50 per hour. The math is straightforward and the implications are obvious. What most readers miss is that this specific example is not actually about electricians or even about California. It is about every skilled profession in every geography where robots can perform work that humans currently do, and the real question is not whether this displacement will happen but rather who will own and control the infrastructure when it does. @Fabric Foundation launched this week with a specific answer to that question, and understanding why their answer matters requires examining what the electrician example actually reveals about the economics of skill-sharing machines.
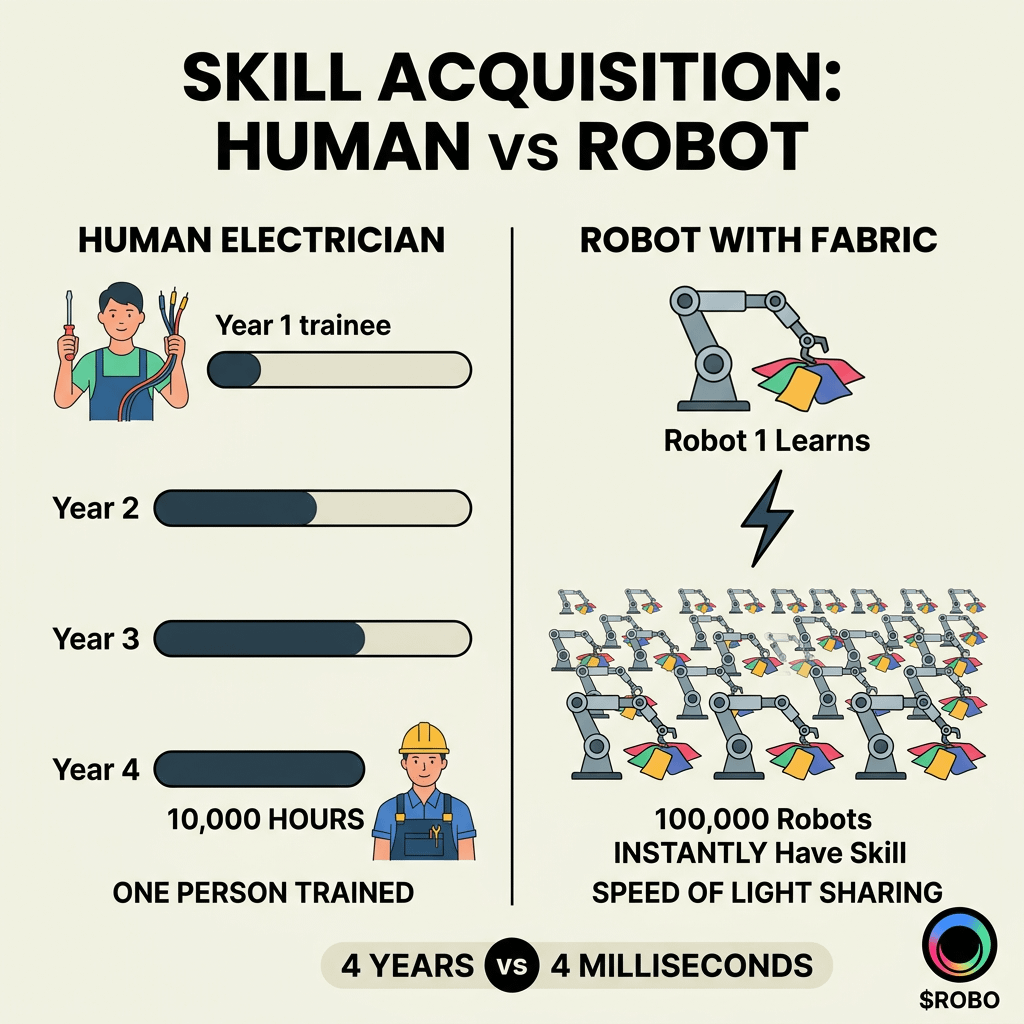
The critical insight in the electrician robot example is not the cost reduction from $63.50 per hour to $3-12 per hour, though that reduction is significant enough to make the transition economically inevitable regardless of policy interventions or union protections. The critical insight is that once one robot has learned California Electrical Code and acquired the physical dexterity to perform electrical work safely, that skill can be shared with 100 or 100,000 other robots instantaneously. Humans require 8,000 to 10,000 hours of training to reach journeyman proficiency. Machines share skills at the speed of light. This asymmetry is not a temporary technological advantage that will diminish as robots become more common. It is a structural characteristic of digital cognition that becomes more powerful as the number of robots increases and as the variety of skills they master expands.
Consider what this means when extended beyond electricians to every profession where skill acquisition currently creates economic value and entry barriers. A robot that masters HVAC systems shares that skill instantly across the entire robot fleet. A robot that becomes proficient in surgical procedures shares that capability with every other robot immediately. A robot that learns to drive safely in complex urban environments shares that skill at the speed of light, which is why Waymo autonomous vehicles already demonstrate 8-fold fewer accidents than human drivers and why most of the remaining Waymo accidents are caused by distracted human drivers colliding with the autonomous vehicles rather than the autonomous vehicles making errors.
The skill-sharing characteristic of digital cognition creates economic dynamics that do not exist in human labor markets. In human labor markets, skills are distributed across individual workers who each spent years acquiring expertise, which creates natural limits on how quickly an industry can scale and how much concentration can occur before running into skilled labor shortages. In machine labor markets where skills are shared instantly, there are no such natural limits. The first organization to master a particular skill can deploy that skill across unlimited machines immediately, and can add additional skills to the same hardware platform without retraining each unit individually. This is what the Fabric Protocol whitepaper describes as "winner takes all" risk, and it is the central problem that decentralized robotics infrastructure exists to address.
If a single company controls ROBO1 and owns the skill chips that robots use to perform work, that company could start with electricians, add plumbing skills to the same robots, branch into HVAC, expand to surgical assistance, scale into transportation, and eventually control entire sectors of the economy because the economics of instant skill sharing favor concentration rather than competition. The company that reaches market first with adequate hardware and software could incrementally add capabilities faster than competitors can establish themselves, because each new skill makes the platform more valuable to users and creates more training data that improves all existing skills through the shared learning infrastructure.
This is not hypothetical concern-mongering about theoretical risks. This is a description of the natural economic trajectory that emerges from the technical characteristics of skill-sharing machines combined with closed proprietary platforms. The only structural intervention that changes this trajectory is open protocols where robot capabilities, training data, and skill improvements are coordinated through public ledgers rather than controlled by single entities. $ROBO implements this intervention specifically by making three architectural choices that closed robotics platforms cannot replicate without abandoning the business models that make them attractive to venture capital.
CHOICE ONE: Skill chips as open modules rather than proprietary capabilities. In the Fabric Protocol architecture, skills that robots use to perform work are packaged as modular "skill chips" similar to apps available on Apple's App Store or Google Play, except that instead of being controlled by a platform operator that extracts 30 percent of revenue and makes arbitrary decisions about which apps are allowed, skill chips on @Fabric Foundation infrastructure are contributed by anyone who can train a capability, verified through cryptographic proofs that the skill works as advertised, and compensated directly by users who benefit from the work rather than through a platform tax that the infrastructure operator imposes.
This architectural choice changes who captures value when robots perform work. In a closed platform model, the platform operator captures most of the value because users have no alternative and skill contributors have no leverage. In the open protocol model that Fabric implements, value flows to the contributors who actually created the skills and to the users who fractionally own robots and help improve the system, while the protocol itself captures only the minimum necessary to maintain the infrastructure. The economic difference is not a 10 percent margin adjustment. It is the difference between a system designed to extract maximum value from participants and a system designed to distribute value to participants based on their actual contributions.
CHOICE TWO: Public ledger coordination of computation, ownership, and oversight. When a robot trained on Fabric Protocol performs electrical work, the computation that produced that work is recorded on a public ledger with cryptographic proofs that tie the output to the specific skill chip and training data that were used. This creates accountability that does not exist in closed systems where the company operating the robot is the only entity with access to the logs and the only entity with incentive to interpret those logs in ways that minimize liability and protect proprietary advantages.
The practical significance of this choice becomes visible when something goes wrong. If an electrician robot makes an error that causes a fire, the question is not "do we trust the company's explanation of what happened" but rather "what does the verified computation record show about which skill chip was active, what training data it relied on, and whether it followed the programmed safety constraints." The difference between trust-based accountability and verification-based accountability is the difference between a nine-month legal settlement process where neither party knows what actually happened and a two-week resolution where the verified facts determine liability allocation.
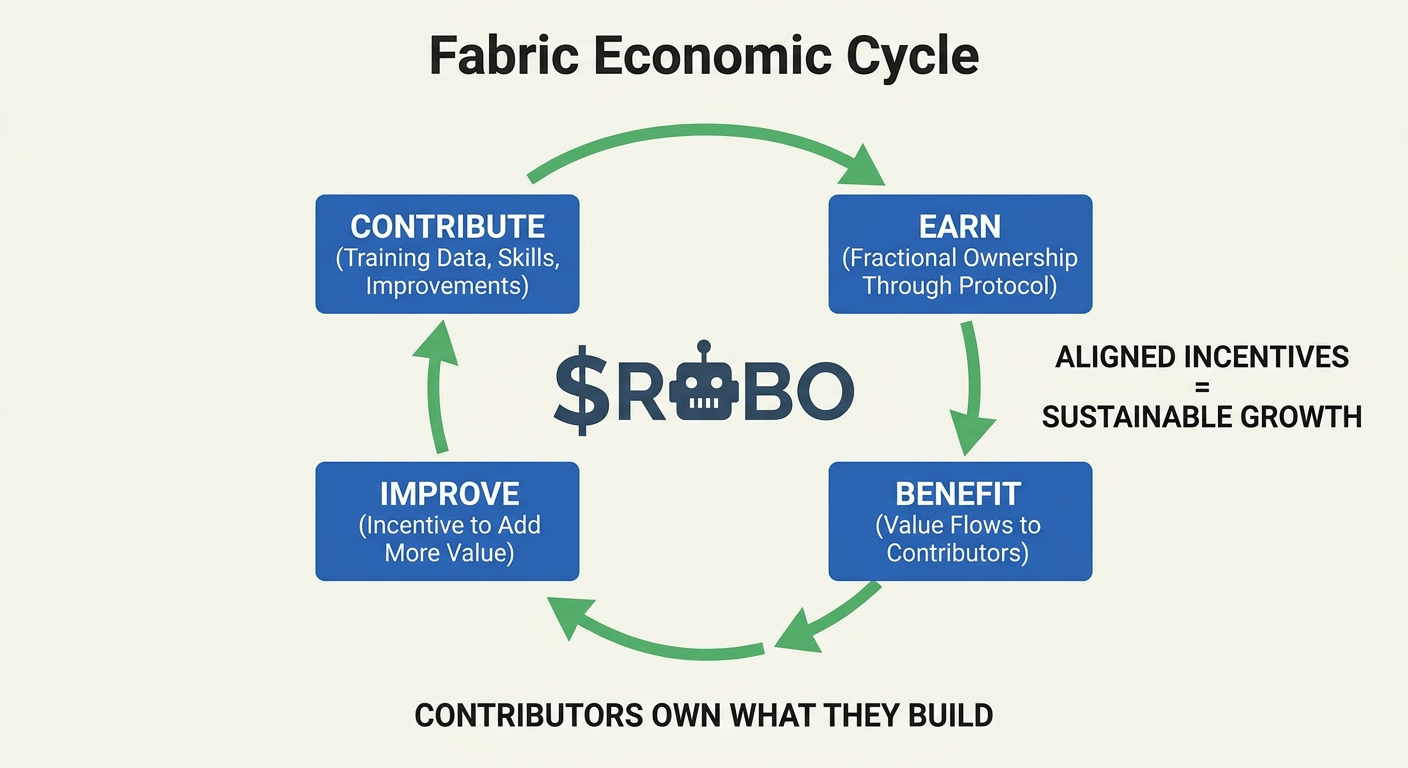
CHOICE THREE: Fractional ownership and contributor rewards that align incentives with long-term ecosystem health rather than with short-term extraction. In the Fabric Protocol economic model, people who contribute training data, who improve skill chips, who help secure the network, and who provide the physical robots that perform work all earn fractional ownership through the protocol rather than selling their contributions to a company that owns everything. Users who pay to access robot capabilities are paying contributors directly rather than paying a platform operator who decides how much to share with contributors based on internal priorities.
This creates an economic cycle where the people who make the system better own the benefits of making the system better, which means their incentives are aligned with building capabilities that have long-term value rather than with extracting maximum short-term revenue before competitors catch up. A contributor who owns fractional stake in the protocol benefits when the protocol becomes more useful, which means they have incentive to contribute genuinely valuable improvements rather than incremental features that look good in marketing materials but do not actually make robots more capable.
Returning to the electrician example: 23,000 robots replacing 73,000 human electricians is going to happen regardless of which infrastructure those robots are built on, because the economics are too compelling for customers who want lower costs, more consistent quality, better code compliance, and protection from the 700 annual work injuries and fatalities that currently occur in California electrical work. The question that Fabric Protocol forces into focus is not whether this transition occurs but rather what happens to the $4.6 billion in annual wages that currently flow to those 73,000 electricians when their work is performed by machines costing one-tenth as much to operate.
In the closed platform model, that $4.1 billion difference flows primarily to the company that owns the robots and the skills, with some portion captured by the customers who pay lower prices. The displaced electricians receive nothing unless government interventions force redistribution through taxes and retraining programs, which is politically difficult to implement and economically inefficient because it separates the people who need support from the economic activity that created the displacement. In the open protocol model that $ROBO implements, a significant portion of that value flows to contributors who helped train the electrical skill chips, who improved robot dexterity, who verified that the work meets code requirements, and who fractionally own robots that perform the work.
This does not mean electricians who get displaced automatically receive income from the protocol—the protocol rewards contributions, not displacement—but it does mean that the economic opportunity to contribute to and benefit from robotics infrastructure is open to everyone rather than being captured by whoever controls the closed platform. An electrician with 10,000 hours of expertise in California Electrical Code could contribute that knowledge as training data for skill chips and earn ongoing compensation as those skills are used across the robot fleet, rather than being displaced with no recourse because a company trained its own robots using datasets the electrician never consented to and never benefited from.
The honest acknowledgment that prevents this from being purely idealistic advocacy is that open protocols have coordination costs that closed platforms do not have. A company can make decisions quickly and deploy changes without building consensus across a distributed network of contributors. A company can capture value efficiently through platform taxes and then allocate that value based on internal priorities without negotiating with everyone who contributed. These efficiency advantages are real, and they explain why many successful technology platforms have used closed architectures even when those architectures create the concentration and lock-in problems described earlier.
What makes the open protocol approach worth the additional coordination overhead in robotics is that the consequences of concentrated control in robotics are more severe than in most other technology domains. When a single company controls social media, users might have worse experiences and less choice, but the direct physical harm is limited. When a single company controls the robots that perform essential work across manufacturing, healthcare, transportation, and daily life, the consequences of that company optimizing for its own interests rather than for ecosystem health include physical safety risks, economic inequality at scales that threaten social stability, and concentration of power that undermines the governance structures societies rely on to remain functional.
@Fabric Foundation launched this week with infrastructure designed to prevent that concentration before it becomes locked in through network effects that are too expensive to reverse. The 23,000 electrician robots replacing 73,000 human electricians are coming whether or not anyone launches an open protocol. The question is whether those robots operate on infrastructure where skills, ownership, and oversight are distributed through verifiable public ledgers or on infrastructure where a company controls everything and everyone else trusts that the company's interests will magically align with their own.
The builders, contributors, and early adopters who choose Fabric Protocol today are making a specific bet about which model produces better long-term outcomes when robots become essential infrastructure rather than experimental technology. They are betting that the short-term convenience of closed platforms is worth less than the long-term benefits of open protocols that prevent winner-takes-all concentration, that enable anyone to contribute and benefit rather than requiring permission from platform operators, and that make robot behavior verifiable rather than trusting companies to self-report honestly about systems they have financial interest in obscuring.
The electrician example is just one numerical case study from a whitepaper full of technical detail about cognition stacks, genome-inspired architectures, and skill chip modularity. But it is the example that makes the economics concrete rather than abstract. When you can calculate exactly how many jobs are displaced, exactly how much cost is reduced, and exactly how much value is created or captured depending on who owns the infrastructure, the choice between open and closed protocols stops being a philosophical debate and becomes a calculation about which architecture produces outcomes you want to live with when robots perform half the work humans currently do.
#ROBO @Fabric Foundation $ROBO
