@Fabric Foundation Protocol: When Robots Need a Way to Work Together
When I first started reading about Fabric Protocol, I tried not to get carried away by the usual excitement that surrounds new tech projects. Instead, I kept asking myself a simple question: how would something like this actually function in the real world?
It’s easy to talk about decentralized robotics in theory. The idea sounds impressive robots working together through open networks instead of closed systems. But once you think about how robotics works today, you realize things are much more complicated.
Most robots currently operate inside their own environments. A robot built by one company usually runs on its own software and communicates only with systems designed for it. Because of that, different machines often struggle to interact with each other smoothly.
That’s the gap Fabric Protocol seems to be trying to address.
A Shared Layer for Robotics
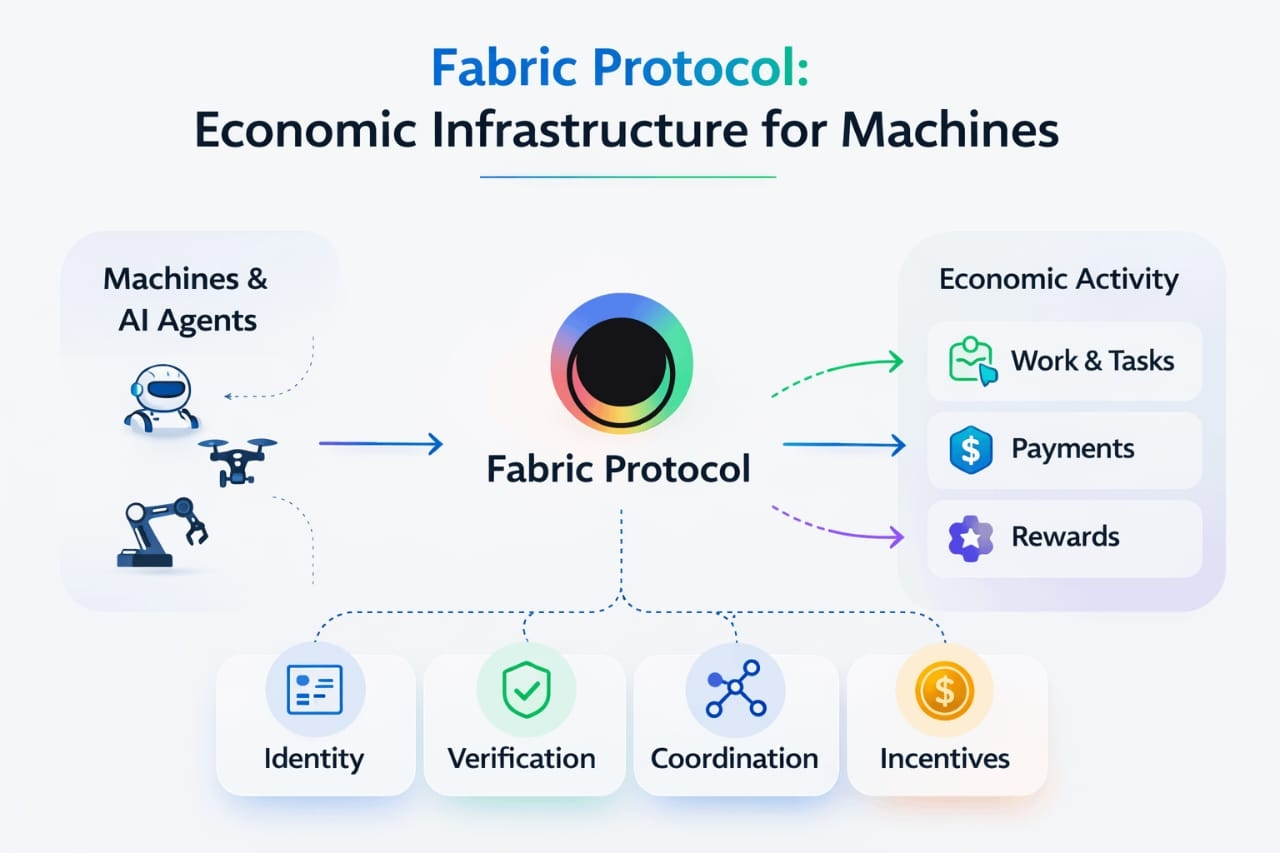
The core idea behind Fabric Protocol is fairly straightforward. It aims to create a shared infrastructure where different robotic systems can communicate and coordinate.
Instead of each robot operating alone in a closed ecosystem, the protocol could allow machines, developers, and data sources to interact through a common framework. In practice, that might mean robots sharing information, verifying completed tasks, or coordinating actions more efficiently.
It’s less about replacing existing systems and more about building a layer that connects them.
Using a Ledger as a Reference Point
Another interesting aspect is the use of a public ledger within the system. Rather than relying entirely on trust between operators or companies, certain robotic actions could be recorded and verified through the network.
For example, if a robot completes a job or processes some data, that activity could be confirmed within the infrastructure itself. The network becomes a shared place where information about actions, rules, and results can be checked.
In this sense, the ledger isn’t just a record of events. It acts more like a shared reference point that everyone in the system can rely on.
Moving Beyond Blind Trust
As robotics becomes more autonomous, the issue of trust naturally becomes more important. Today, people often have to trust that a machine did what it was supposed to do.
If verification becomes part of the infrastructure, that trust could be supported by actual confirmation. Instead of simply assuming a task was completed correctly, systems could verify it through the network.
It may seem like a small change, but when machines start operating at large scales, that kind of transparency can become extremely valuable.
The Real Test
Of course, building a system like this comes with challenges. If robots start depending on shared infrastructure for coordination, that infrastructure must be stable, secure, and always available.
Distributed systems can work well, but they also require strong governance and careful monitoring. Designing the protocol is only part of the journey the real test is keeping it reliable in real world conditions.
Looking Toward the Future
What makes Fabric Protocol interesting isn’t just whether it succeeds immediately. It’s the bigger idea behind it.
As automation grows and robots become more common across industries, the need for systems that help them communicate and coordinate may become unavoidable.