@Fabric Foundation #ROBO $ROBO

When I first looked at the idea of robot economies it felt like watching someone build a car and assume it would drive itself if you just made the engine strong enough. Everyone talks about stronger hardware, higher speed, better sensors, but quietly, underneath all that optimism, there is a texture of inefficiency that no amount of better machinery fixes. Hardware matters. But without coordination layers that organise, manage, and align multiple robotic actors and stakeholders, robot economies risk being powerful but chaotic.
What strikes me most is how often people equate physical capability with economic value. They assume a thousand delivery bots in a city somehow produce an efficient logistics ecosystem. But a fleet of a thousand without coordination is like a thousand drivers all trying to use the same narrow alley. You get congestion, wasted energy, frustration, and ultimately a lower quality of service than if you had fewer but coordinated actors.
On the surface, a robot economy consists of individual robots with sensors and actuators, some local processing and connectivity. That’s the hardware layer most coverage focuses on. You also have software to make each robot function and possibly some cloud backend for remote updates. That’s all necessary but not sufficient. Underneath that is a fundamental coordination problem: how do these agents decide who does what job, avoid conflict, allocate shared resources like power or space, and learn from outcomes over time to improve the overall system?
When autonomous cars started to appear in discussions a decade ago people saw a future where sensors plus AI equals smooth traffic. But smooth traffic is not just a property of good sensing and control in each vehicle. Traffic flow is an emergent property of interactions among many agents and infrastructure. We see it in real cities: a single vehicle with greater capabilities does not reduce congestion where there is no effective traffic management. Robot economies are more complex because the agents have economic incentives and heterogeneous goals.
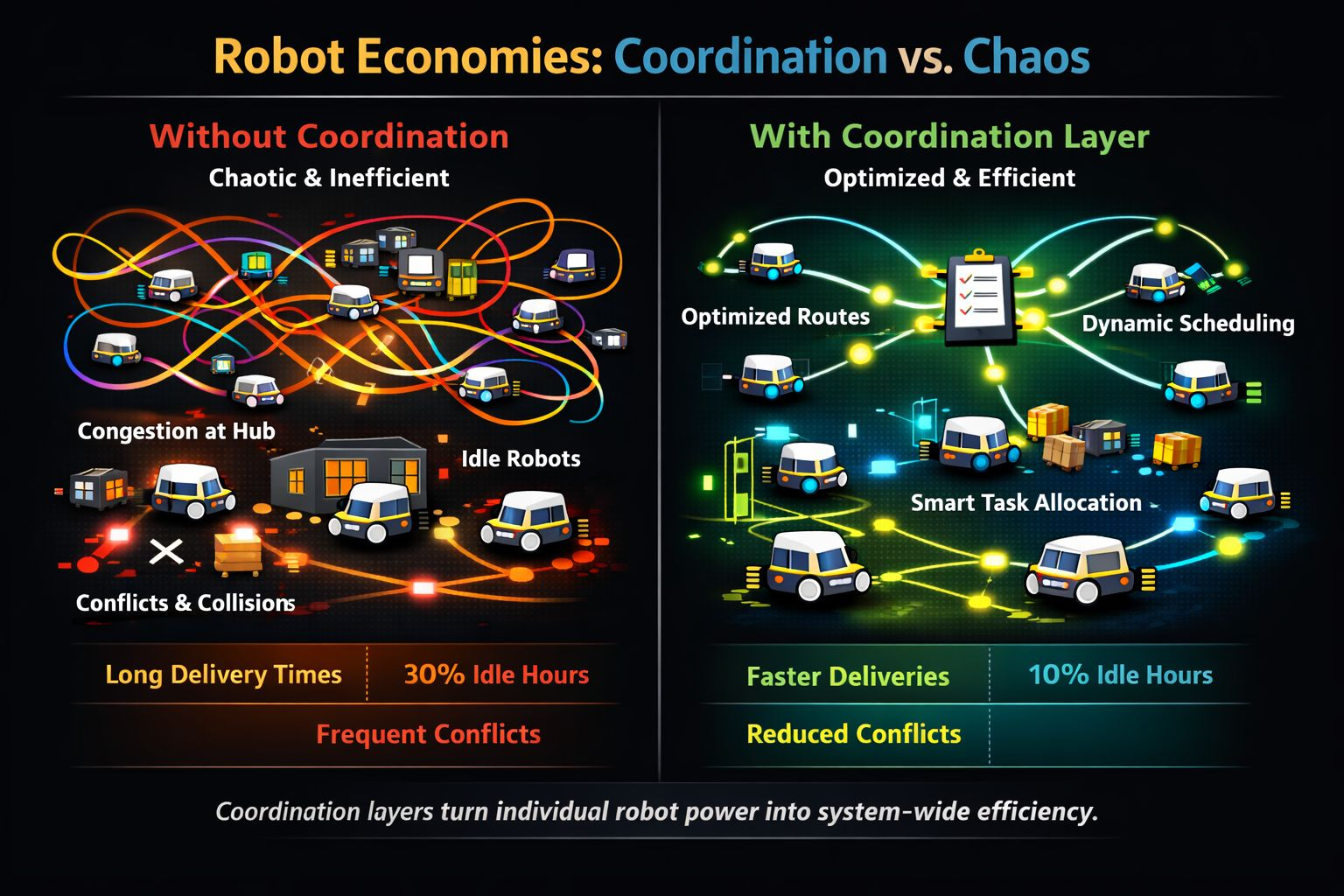
Look at warehouses where robots are deployed today. Those are controlled environments with strict rules, predefined paths, and central management systems telling each unit what to do. When a new robot economy scales outside those controlled perimeters into the messy real world of cities, homes, and markets, there is no central dispatcher telling everyone what to do in real time. You suddenly end up with conflicts that the hardware cannot resolve alone. Robots circling docks because they “think” they have priority. Delivery bots queuing inefficiently at elevators. Charging stations being overused at certain times while others sit idle. Every inefficiency is amplified because you are no longer coordinating 10 units but hundreds or thousands.
Data from early deployments makes this concrete. In a mid-sized logistics pilot in Europe, autonomous delivery robots were used for last-mile deliveries. On paper they could complete 60 percent of deliveries autonomously with hardware reliability above 95 percent. That sounds strong until you look deeper: hours of idle time due to congestion at hubs accounted for 30 percent of operational hours. Another 5 percent of deliveries required human intervention because robots got into decision deadlocks at complex intersections. The hardware did its job but the lack of a coordination layer that could dynamically allocate routes, adjust priorities, and adapt to unexpected delays meant that the system’s efficiency was well below its theoretical potential.
Notice that the robots had good hardware and decent software individually. What was missing was something that could orchestrate their behavior collectively, considering shared constraints and global objectives. A coordination layer schedules tasks on the surface. Underneath it needs to understand priorities, predict bottlenecks, mediate conflicts, and negotiate tradeoffs. That requires models of not just physical space and time but also economic incentives.
In human economies markets serve that role. Prices, contracts, reputation systems, and social norms implicitly coordinate billions of individual decisions. If apples are scarce their price rises, signalling producers to allocate more resources to apple cultivation. Robots don’t yet have that kind of self-organised economic signalling baked into their systems. Experiments with machine-to-machine markets where robots can bid for tasks based on energy levels and delivery deadlines show early promise, reducing idle time by 15 to 20 percent. But bid strategies can lead to oscillations where everyone chases high-paying tasks and low-paying tasks go undone. Without regulatory or algorithmic dampers those cycles can reduce system stability.
This starts to look less like engineering and more like economic design. What does it mean for a robot to have an incentive to cooperate rather than compete? How do you ensure fairness among different vendors’ robots sharing the same environment? When robots transact with humans and firms via smart contracts, how do you settle disputes? Coordination layers need shared protocols, agreed rules, and adaptive mechanisms that evolve with use.
Real examples help. In agriculture there are autonomous harvesters, drones for spraying, and robots for sorting. Each is optimized for its own task. But when work zones overlap, a harvester might interfere with a drone’s flight path, or sorting robots might be starved of inputs because harvest schedules weren’t aligned. Simple GPS-based deconfliction helps, but as scale and diversity increase the problems become multidimensional. Coordination layers must be multi-agent systems that reason about time, space, resources, weather, and economic objectives all at once.
There is a natural pushback: isn’t this what AI is for? Give the robots better learning algorithms and they will coordinate. The trouble is emergent coordination from local learning is fragile when incentives are misaligned or agents have private goals. Humans coordinate markets through laws, norms, and shared languages. Robots need analogous constructs to negotiate task allocation without spiraling into conflict, adapt to disruptions, and respect human priorities.
That leads to governance questions. Who sets the rules? If one company’s robots drive faster because their hardware is superior they could dominate shared corridors causing others to stall. Without coordination protocols that enforce equitable access, technological advantage translates into economic exclusion. Many early-stage marketplaces are only superficially considering this.
The building blocks of effective coordination layers go beyond hardware. Shared ontologies ensure every agent speaks the same language about tasks, priorities, costs, and constraints. Dynamic scheduling updates assignments in real time. Conflict resolution mechanisms negotiate tradeoffs. Economic signalling, through pricing or reputation, allocates scarce resources effectively.

Looking at the trajectory, if robot economies remain collections of powerful but isolated units, we will see pockets of efficiency surrounded by systemic inefficiencies. If we invest in coordination architectures that align agents’ behavior with collective goals, the potential is integrated ecosystems. Fleets could self-organize around changes in demand, or home robots coordinate with city infrastructure to reduce congestion. That is the promise if coordination layers evolve alongside hardware.
Yet uncertainty remains. Coordination at scale is notoriously hard. Human history shows markets and governance co-evolve over generations. Can engineered coordination layers keep pace with rapid robotic deployment? Early signs suggest progress but reveal gaps: unregulated bidding can create hoarding; learning systems without oversight may prioritize efficiency over safety. Algorithms need oversight and human-in-the-loop monitoring.
The sharpest insight I keep returning to is this: robot economies are defined not by individual machines’ capabilities but by the quality of the invisible scaffolding that binds them. Hardware is the foundation, but coordination layers are the structures that make it livable. Without them, impressive machines fall short of economic potential. Coordination matters more than horsepower when systems grow beyond a handful of agents.