I first noticed it during a routine multi vendor fleet integration test. One of our $ROBO units failed to reconcile a task assignment from the shared Fabric Protocol ledger, leaving a high value delivery in a limbo state. The firmware was up to date, the token bond was intact, yet the robot’s autonomy clashed with human expectations. That moment made me realize that the operational challenge wasn’t hardware it was accountability.
What changed was not the robot’s performance. It was governance. Suddenly, every action, every completed task, had a traceable ledger entry but that traceability didn’t equate to liability. I started experimenting with how ROBO units coordinated through Fabric, and I began to see patterns. Coordination wasn’t just a network problem. It was a human system problem.
Fabric Foundation has built a shared coordination layer for heterogeneous fleets. Each robot publishes its capabilities, task claims, and completion proofs on chain. Token weighted governance determines whether task arbitration or challenge mechanisms activate. The protocol doesn’t stop robots from acting autonomously; it makes disagreement cheaper, verifiable, and economically incentivized. I noticed that when an availability failure triggered a bond slash, operators adjusted their monitoring routines almost instantly. Incentives reshaped behavior faster than any manual oversight could.
But second order effects are unavoidable. Latency spikes under peak load made some high speed tasks miss deadlines. Cognitive overhead increased because humans now needed to understand on chain decision flows, not just offline schedules. Vendor resistance emerged some hardware teams were hesitant to cede control to a ledger based coordination layer. You start realizing that operational confidence doesn’t come from the robot executing correctly alone; it comes from the ecosystem being auditable, predictable, and interoperable.
The most uncomfortable lesson came when a verified ROBO task led to minor physical damage despite meeting all protocol standards. Protocol metrics availability, quality, and task verification were perfect. Yet the outcome was harmful. Fabric Protocol doesn’t adjudicate real-world consequences. It settles claims, slashes bonds for fraud or availability failures, and enforces economic integrity but it can’t compensate for misaligned physical outcomes. Observing this, I began experimenting with human in theloop feedback via the global robot observatory concept. Thumbs-up or thumbs-down feedback creates a scalable human oversight layer that most autonomous deployments ignore.
Through these experiences, I’ve learned that ROBO and Fabric together don’t just automate tasks they transform how accountability is structured. Robots become protocol governed assets rather than vendor controlled tools. Coordination layers reduce operational friction and increase flexibility. Immutable network logic enables scalable, auditable fleet operations that humans can trust to behave predictably, even when outcomes are uncertain.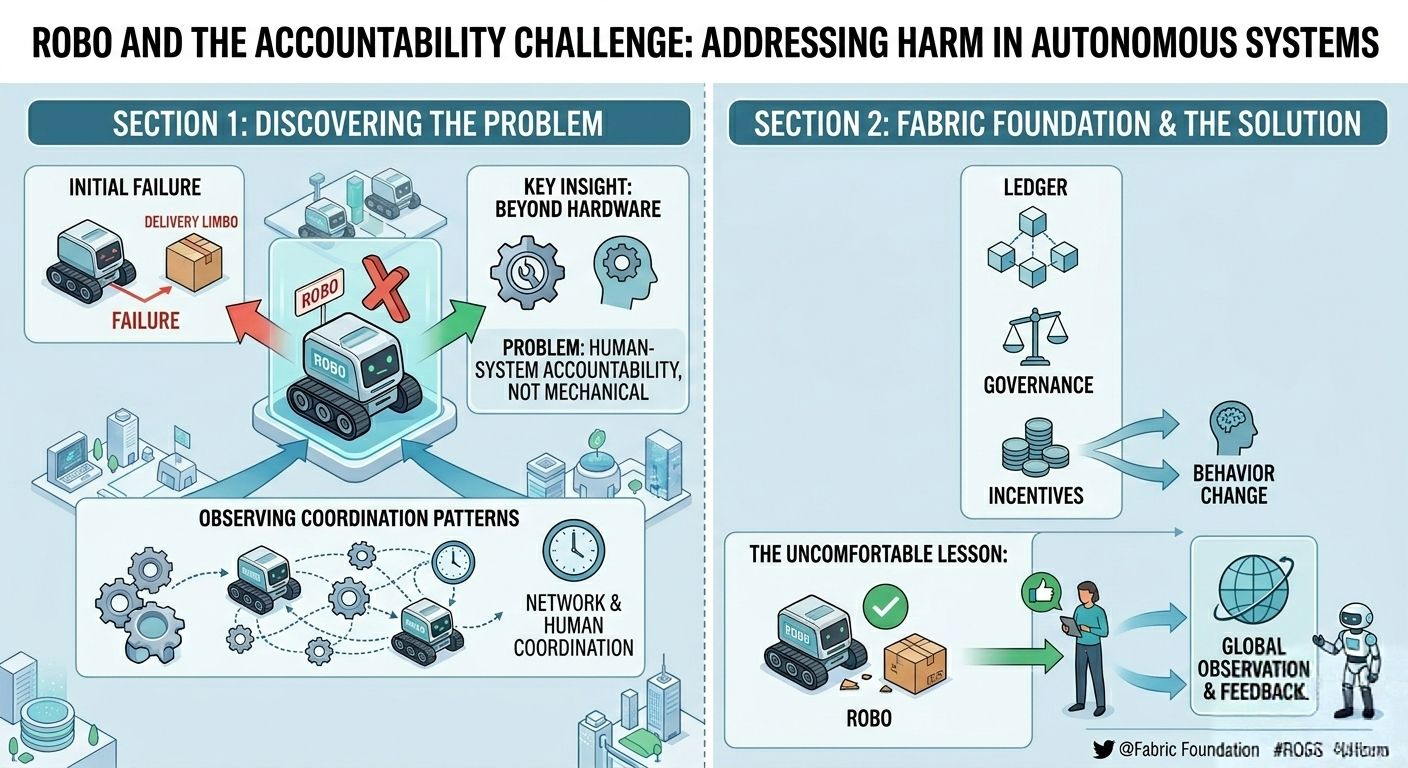
For the first time, adding hardware does not feel like adding friction. You stop asking permission from a brand and start interacting with protocol rules instead. You learn that economic incentives, verifiable logs, and interoperable governance shape behavior more reliably than top down supervision ever could.