I’ve noticed that most AI blockchains tend to orbit around a similar set of ideas: distributed model training, decentralized compute markets, and incentive structures for machine intelligence.
Those are interesting directions, but they often stay within the digital realm. When I began examining Fabric Foundation, what caught my attention was that its focus shifts from purely digital intelligence to something more physical robots operating in the real world.
That difference may seem small at first, but it changes the entire problem space.
Many AI blockchains try to decentralize the creation or sharing of intelligence. Networks like Bittensor, for example, organize incentives around producing useful machine learning outputs.
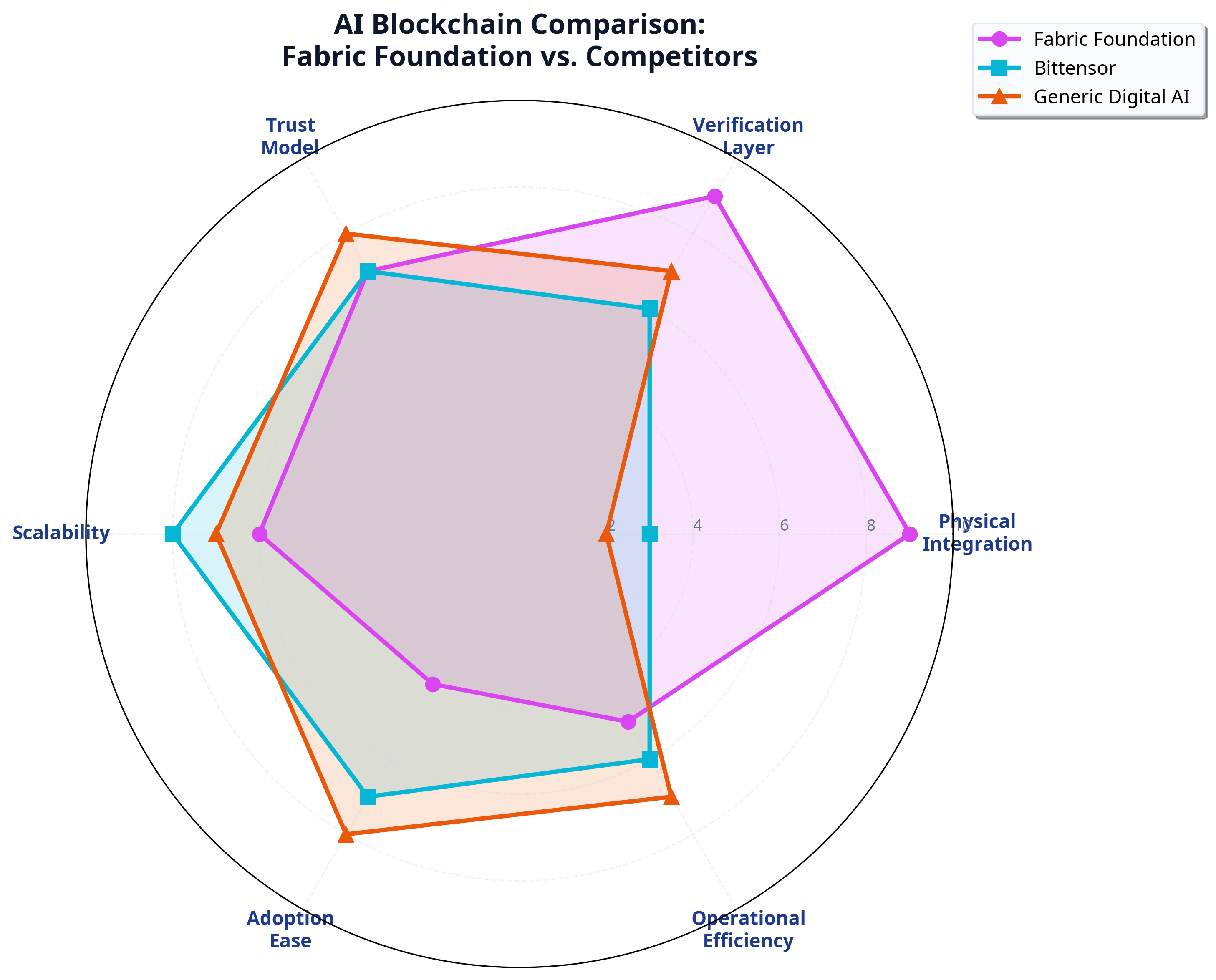
The goal is to create an open marketplace where models compete and collaborate. That approach treats intelligence itself as the primary commodity.
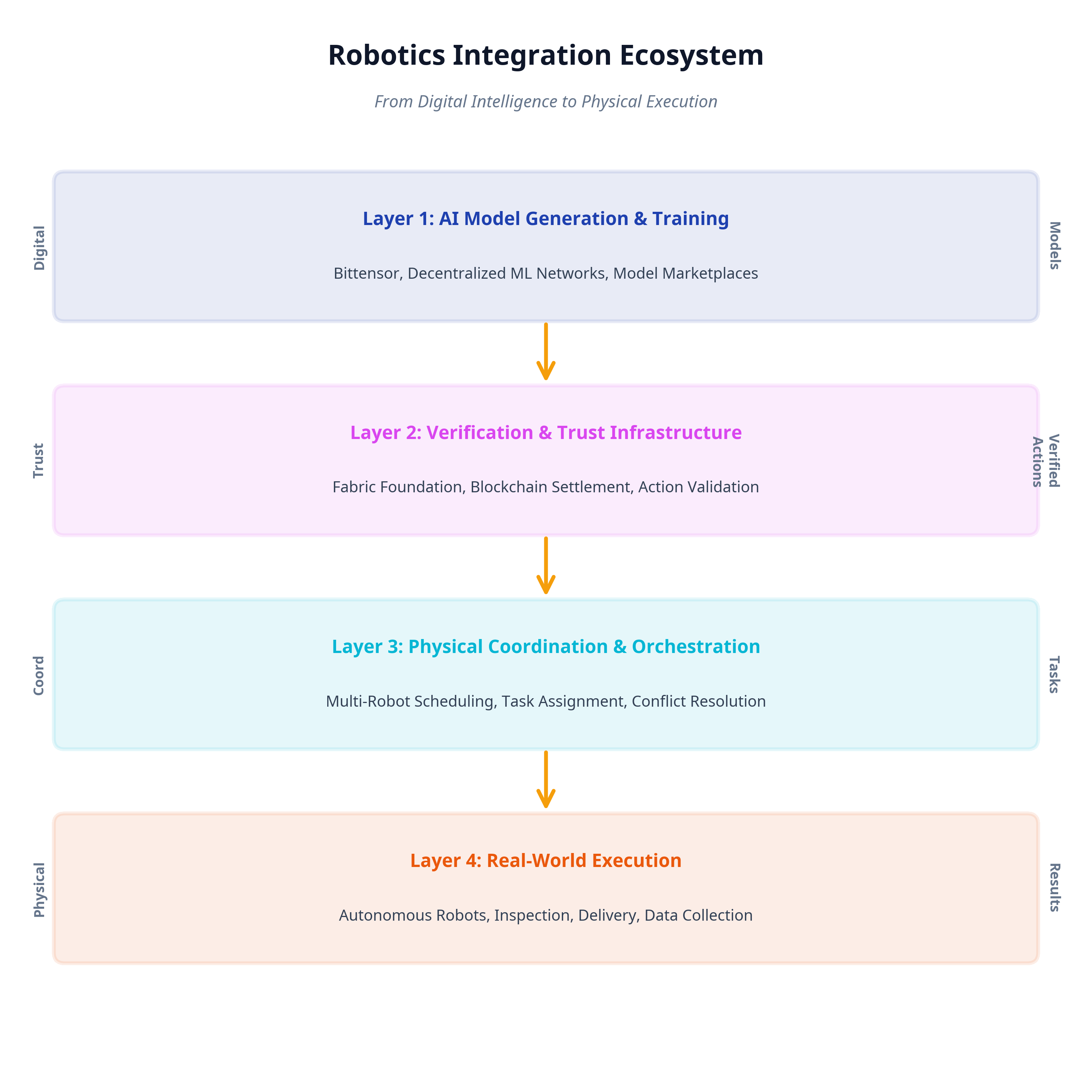
Fabric Foundation, at least from what I can see, approaches the problem from another angle. Instead of focusing on generating intelligence, it focuses on coordinating machines that already act in the physical world.
Robots perform tasks inspection, delivery, maintenance, data collection and those actions create economic value. Fabric’s infrastructure attempts to verify those actions and enable settlement across participants that might not trust each other.
From my perspective, this places Fabric in a slightly different category from most AI blockchains.
Digital AI systems operate inside relatively predictable environments. Data moves across servers, models generate outputs, and verification can often rely on reproducible computation. Robotics introduces a different set of challenges entirely.
Physical environments are messy. Sensors degrade. Machines encounter obstacles. Tasks rarely unfold exactly as planned. Any infrastructure designed to coordinate robotic activity must account for that uncertainty.
This is where Fabric’s emphasis on verification begins to make sense to me. Rather than trying to control robots or train their intelligence, it focuses on recording and validating what they actually did.
In theory, that verification layer could allow multiple organizations to coordinate robotic work without relying on a single centralized platform.
Still, I remain cautious about assuming this makes Fabric superior to other AI blockchain models.
Infrastructure designed for physical systems faces a much steeper path to adoption than infrastructure designed for purely digital networks. AI blockchains that focus on compute markets or model sharing can integrate with existing software ecosystems relatively easily. Robotics infrastructure, on the other hand, must interact with hardware operators, maintenance cycles, regulatory frameworks, and safety protocols.
That complexity can slow progress considerably.
I also think about incentives. In digital AI ecosystems, contributors can often participate remotely with minimal overhead. In robotics, the operators deploying machines face real operational costs—energy, hardware wear, repairs, and downtime.
Any decentralized coordination layer has to align with those economic realities. If verification or settlement mechanisms become too burdensome, operators may default to simpler centralized solutions.
At the same time, the potential value of coordination across robotic systems shouldn’t be dismissed too quickly. As autonomous machines become more common in logistics, infrastructure inspection, agriculture, and urban services, the number of independent operators involved will likely increase.
When multiple stakeholders rely on machines performing tasks in shared environments, the need for neutral verification becomes harder to ignore.
In that sense, Fabric Foundation’s approach feels less like a direct competitor to other AI blockchains and more like a complementary layer within a broader ecosystem. Networks that focus on intelligence, training, or data markets address one part of the AI landscape.
Fabric attempts to address another the moment when intelligent systems interact with the physical world and produce outcomes that others must trust.
Whether that layer becomes widely adopted is still an open question.
Robotics integration moves slowly compared to software experimentation. Systems must prove reliability before they become infrastructure.
For now, Fabric Foundation looks like an attempt to define how decentralized coordination might extend beyond digital AI and into physical machine economies.
Whether that attempt ultimately reshapes how robotic systems collaborate or simply adds another experimental layer to an already crowded field is something that will likely unfold gradually, as real deployments begin to reveal where coordination truly becomes necessary.