There’s a special kind of infrastructure gamble that’s both completely rational and possibly insane. You identify a problem that will definitely matter if certain technology reaches mainstream adoption. You build sophisticated infrastructure solving that problem. Then you sit back and hope the underlying technology scales faster than your runway burns. Fabric Protocol ($ROBO) is making exactly this bet with robot coordination infrastructure.
The logic is airtight. If general-purpose robots become ubiquitous in shared human environments, they’ll need coordination infrastructure that doesn’t exist today. Different manufacturers’ robots will need to communicate, share learnings, follow governance rules, and maintain accountability. Open neutral infrastructure for this coordination makes perfect sense. The only question is whether robots reach that deployment level before Fabric runs out of money building for a future that might arrive in 2030 or 2040 instead of 2026.
The Coordination Problem That’s Currently Theoretical
Here’s what robot coordination looks like today: it mostly doesn’t happen. Warehouse robots from one company operate in isolation from robots made by competitors. Delivery robots run on proprietary systems that don’t communicate externally. Service robots in controlled environments have no need to coordinate with anything outside their managed deployment. The coordination problem Fabric solves is real but it’s not acute yet because robots haven’t reached scale where it matters.
Fabric is building for the future where robots are everywhere and coordination becomes critical for safety and efficiency. Delivery robots from different companies sharing sidewalks need to coordinate movements. Warehouse systems from multiple vendors operating in the same facility need to communicate. Service robots in buildings need to interact with each other and with building management systems. This coordination requires open infrastructure that all robots can use regardless of manufacturer.
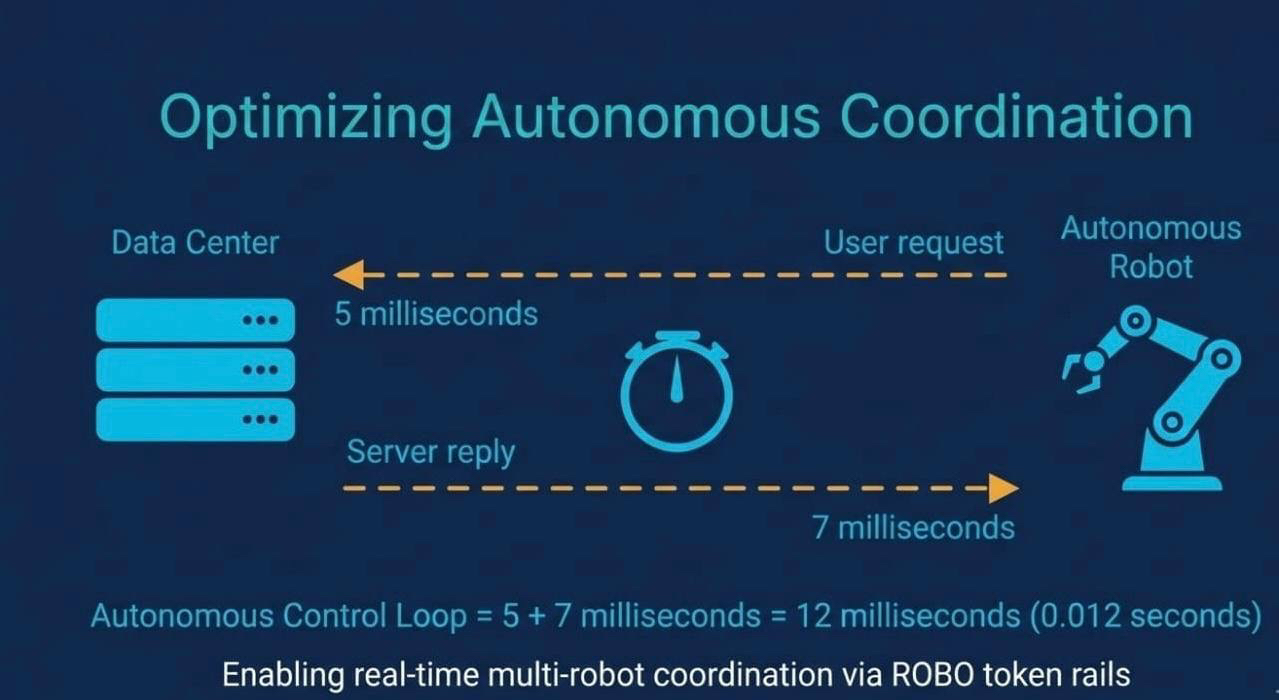
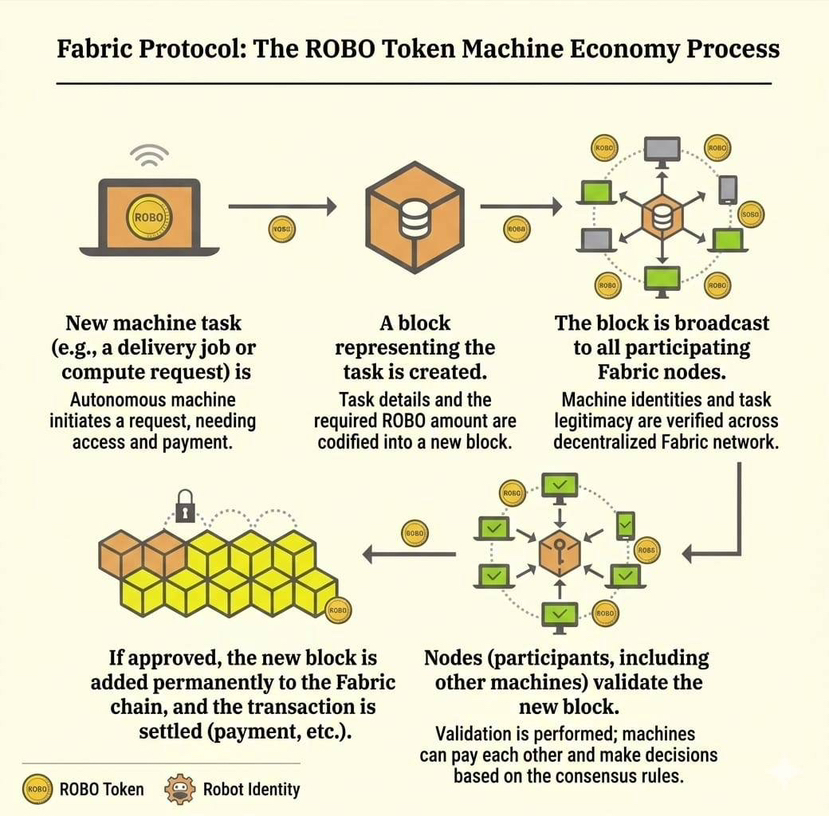
The architecture they’re building makes sense for this future. Verifiable computing creates transparency and accountability for robot actions. Agent-native infrastructure treats robots as first-class participants coordinating at machine speed. Modular design lets different robots integrate only the capabilities they need. Non-profit governance through Fabric Foundation ensures neutrality across competing commercial interests. These are all reasonable choices if the robot deployment future arrives soon.
The problem is “soon” might mean a decade or more. Industrial robotics is growing steadily but general-purpose robots in everyday environments remain experimental. Boston Dynamics makes impressive demonstration videos but deployment is limited. Delivery robots are pilots rather than mainstream. Humanoid robots are R&D projects. The ubiquitous robot future requiring coordination infrastructure might be farther away than Fabric’s funding timeline allows.
Why Verifiable Computing Matters for Machines Making Decisions
The technical focus on verifiable computing addresses real trust issues that emerge when autonomous systems operate in shared spaces with humans. When robot makes decision affecting safety, there needs to be transparent record of what information it used and what computation led to that decision. This isn’t just for debugging. It’s for accountability, improvement, and building public trust in robot systems.
Traditional proprietary robot systems are black boxes. When something goes wrong, the manufacturer investigates internally and maybe shares findings. There’s no independent verification of what happened or why. This opacity works fine in controlled industrial settings but becomes problematic when robots operate in public spaces where actions affect uninvolved people who have no relationship with the robot operator.
Fabric’s verifiable computing creates permanent cryptographic record of robot decision-making. When delivery robot swerves unexpectedly near a pedestrian, the record shows what sensors detected and what navigation algorithm decided. When warehouse robots coordinate to move heavy equipment, the coordination protocol is documented and verifiable. When service robot interacts with vulnerable person, the interaction is recorded for safety review and continuous improvement.
This transparency serves accountability but also enables learning. Robots can study successful and unsuccessful decisions from other robots in the network. Good navigation strategies get shared. Safety incidents get analyzed across entire fleet rather than just within single manufacturer’s systems. The network becomes smarter faster than individual systems could through isolated learning. This is genuine value that proprietary approaches can’t easily replicate.
The Governance Problem That Might Break Everything
Here’s where theoretical infrastructure meets messy reality. Building technology for robot coordination is difficult engineering problem with known solutions. Building governance frameworks that actually work for coordinating behavior of autonomous systems from competing manufacturers across different jurisdictions is substantially harder problem with no proven solutions.
Fabric Foundation being non-profit creates credibility for neutral governance but doesn’t solve the actual governance challenges. Who decides what constitutes acceptable robot behavior in shared spaces? How do rules get updated as technology evolves and social norms change? What happens when different jurisdictions have conflicting requirements? How are violations detected and enforced when robots are operating autonomously?
These questions have no obvious answers and different stakeholders have completely conflicting interests. Delivery companies want permissive rules maximizing efficiency. Pedestrians want restrictive rules maximizing safety. Municipalities want rules preventing congestion. Privacy advocates want limits on robot sensing. Labor unions want rules protecting jobs. Finding governance frameworks balancing these interests while remaining technically implementable is genuinely difficult.
The governance has to work globally or the protocol fragments into incompatible regional versions undermining coordination value. But achieving global coordination on robot governance through decentralized protocol while respecting legitimate regional variation might prove impossible in practice. This could be the rock where the entire project breaks regardless of technical quality.
Market Timing Risk That Dominates Technical Risk
The central risk isn’t whether Fabric can build what they’re planning to build. It’s whether robots reach deployment levels making the infrastructure necessary before Fabric exhausts resources maintaining it. This is pure timing risk that can’t be engineered away.
Current robot deployment is growing but remains concentrated in controlled industrial environments. General-purpose robots in shared public spaces are experimental pilots. The infrastructure Fabric is building becomes essential when robots are ubiquitous in everyday environments coordinating constantly with each other and with humans. That future might be five years away or twenty years away. Nobody knows with real confidence.
Infrastructure projects can’t wait until demand is obvious because competitors will have already captured the market. They need to build before demand fully materializes. This creates unavoidable timing risk. Build too early and resources burn while waiting for market development. Build too late and opportunity passes to faster movers. Getting timing right requires both skill and luck.
Fabric is betting that general-purpose robotics reaches coordination-requiring scale within their funding timeline. If robots achieve mainstream deployment in next few years, Fabric is positioned perfectly as essential infrastructure. If deployment remains limited for another decade, Fabric is sophisticated solution to problem that doesn’t exist at scale that justifies infrastructure investment.
What Success Actually Requires
Real success means major robot manufacturers integrate Fabric protocol because coordination benefits justify adoption costs. This requires robots reaching deployment levels where cross-manufacturer coordination provides genuine value rather than being theoretical benefit. It requires governance proving workable rather than fragmenting under competing interests. It requires protocol providing value that proprietary alternatives can’t match.
Partial success involves adoption in specific robotics verticals while remaining niche elsewhere. Maybe warehouse robotics coordinates through Fabric while delivery robots don’t. This creates value without achieving transformative cross-domain coordination. Network effects are weaker when network is vertically fragmented but viable business might exist serving specific niches.
Failure is building infrastructure before robotics reaches scale where it matters and running out of resources before demand materializes. Or discovering that governance doesn’t work and manufacturers prefer proprietary control or centralized regulation. Or competitors building better alternatives after market validates the need. Any of these outcomes makes the infrastructure investment worthless regardless of technical quality.
The Realistic Assessment
Fabric is solving real problems that will matter if general-purpose robotics achieves mainstream deployment. The coordination challenges are genuine. The verifiable computing approach is reasonable. The governance structure makes sense in theory. These fundamentals are solid.
But solid fundamentals don’t guarantee success when market timing dominates outcomes. $ROBO value depends entirely on robots reaching coordination-requiring scale before Fabric’s resources exhaust. That’s timing bet nobody can evaluate with real confidence regardless of how compelling the logic sounds.
For anyone evaluating Fabric and $ROBO the question is simple: do you believe general-purpose robotics reaches mainstream deployment requiring coordination infrastructure within next few years? If yes, this could be valuable. If no, it’s sophisticated solution arriving before the problem exists at scale justifying the infrastructure investment.
The infrastructure thesis is sound. The problem is real. The approach is reasonable. But infrastructure that arrives at the wrong moment creates zero value regardless of quality. Fabric is betting on timing that determines everything else. Whether that bet proves correct we’ll only know after it matters.