
#ROBO $ROBO @Fabric Foundation
I do Modular stack reconciliation passes dragging replay times forever because some skill module just got upgraded.
I Feels like the protocol is second-guessing itself mid-breath.
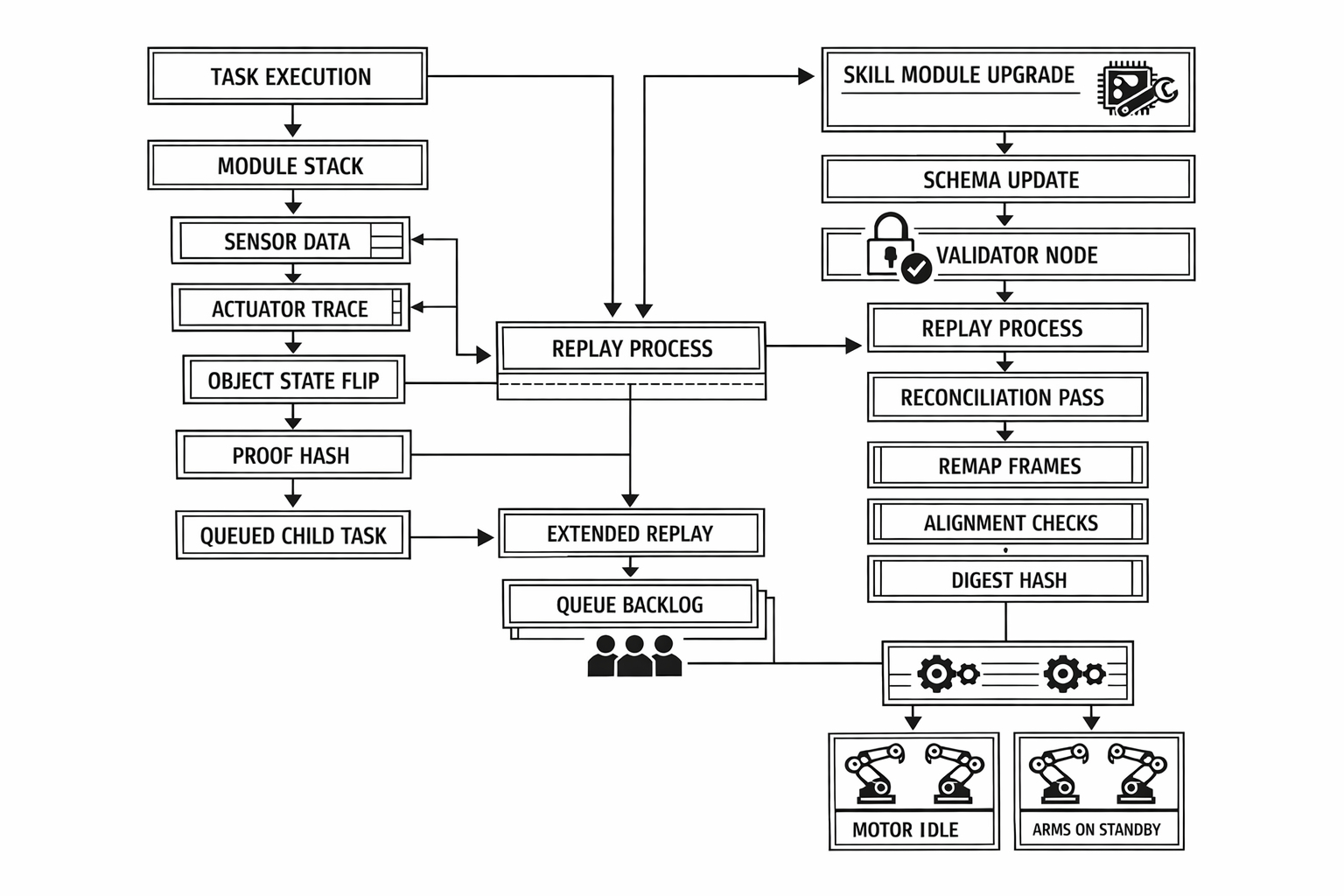
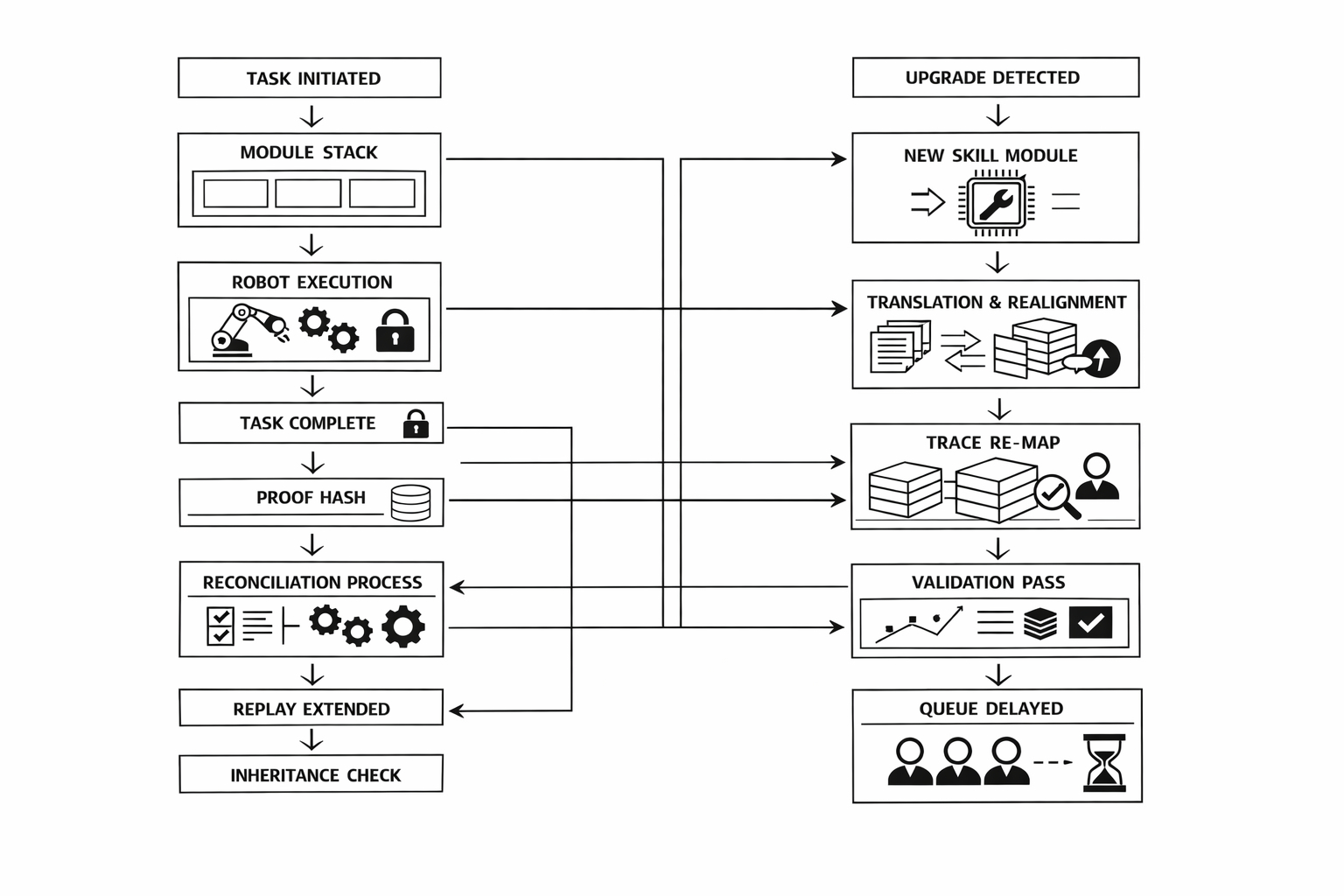
I Task ran perfect. Sensor bundle clean. Actuator trace ended smooth. Gripper released, object state flipped, everything local looked sealed already. I queued the follow-up right behind it — same fixture class, same path profile. Hardware was humming low, ready.
Then the upgrade hit.
I Quiet delta. One new skill module attached. Nothing flashy — just a manipulation primitive that lets the arm twist a half-degree finer. Controller reported it casual, like "oh by the way." No reboot. No break in motion. But the capability surface shifted. Schema bumped one entry.
I Proof envelope already in the queue. Digest visible. Validator worker started replay under the old modular stack.
Then reconciliation kicked in.
I Stack had to align the new skill module retroactively. Translation layer spun up. Compatibility pass. Alignment notes piling. Every frame of the trace got re-mapped against the updated index. Not rejecting — just chewing. Slowly.
Replay time stretched.
I Not dramatic slowdown. Just enough that I stopped glancing at the top line and started watching where the cursor hung. Mid-trace, worker two appended a reconciliation entry. Then another. Then the whole pass looped because the new primitive didn't exist when the task executed.
I Motors cooled a bit. Thermal dropping. Drivers still low whine, but planning nothing new. Queue kept moving for others — fresh identities sliding in, no upgrades in their path. My row? Stuck waiting for the stack to finish arguing with itself.
Pulled the state again.
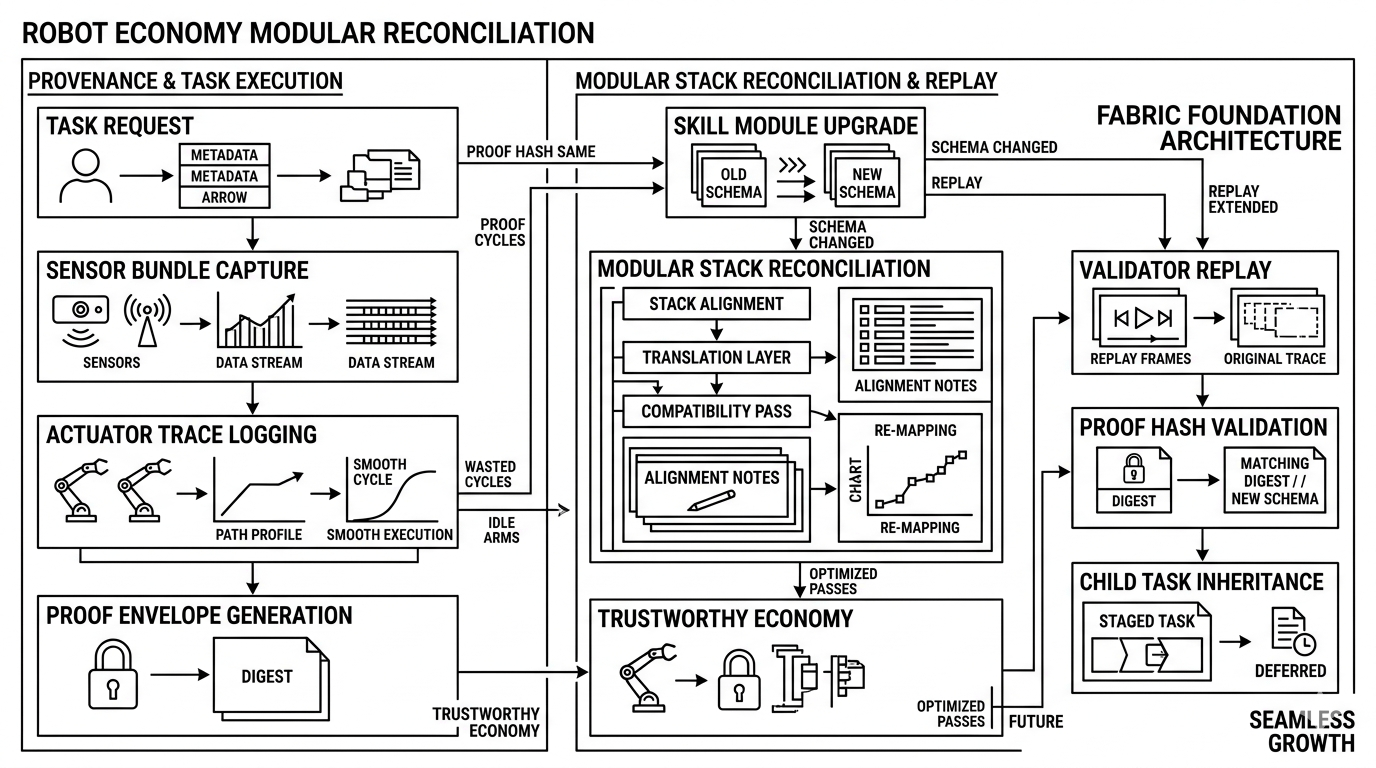
Proof hash same.
Schema changed.
Replay extended.
I Child task sitting staged, inheritance check deferred because the modular stack won't sign off clean yet.
I It's annoying as hell — robot did the work in real time, but on-chain has to replay the entire history through a new lens every time a skill levels up. Wasted cycles. Idle arms.
But i damn if it doesn't show how deep Fabric is going. Modular upgrades without breaking the chain? Reconciliation that actually catches mismatches instead of blind-accepting? That's the kind of paranoia that keeps the robot economy trustworthy long-term.
When I they optimize these passes — cache alignments, parallel workers, maybe even predictive schema previews — replays will snap in sub-second. No more dragging. Just seamless growth. Skill modules stacking without punishing the queue.
Till then, I wait.
Stack reconciles.
Replay crawls.
Arms ready anyway.
