@Fabric Foundation #ROBO $ROBO
The robot finished before the proof path did.
That was the first bad feeling.
The console gave me the easy version first:
task_status: complete
Green marker. Clean line. No hesitation in it. Just enough certainty to make me suspicious.
I opened the coordination ledger before I touched the control panel again. Inside Fabric’s (@Fabric Foundation ) agent-native infrastructure, actions don’t stay whole for long. They split, get routed, get checked, get replayed. Verifiable computing doesn’t accept movement because the robot says it moved. It wants the trail. It wants the machine action audit trail to harden into something the network can live with.
I hit the wrong pane first.
Back.
Then the right one.
The trace was longer than the console admitted.
execution_trace: appended
sensor_packet: confirmed
completion_flag: true
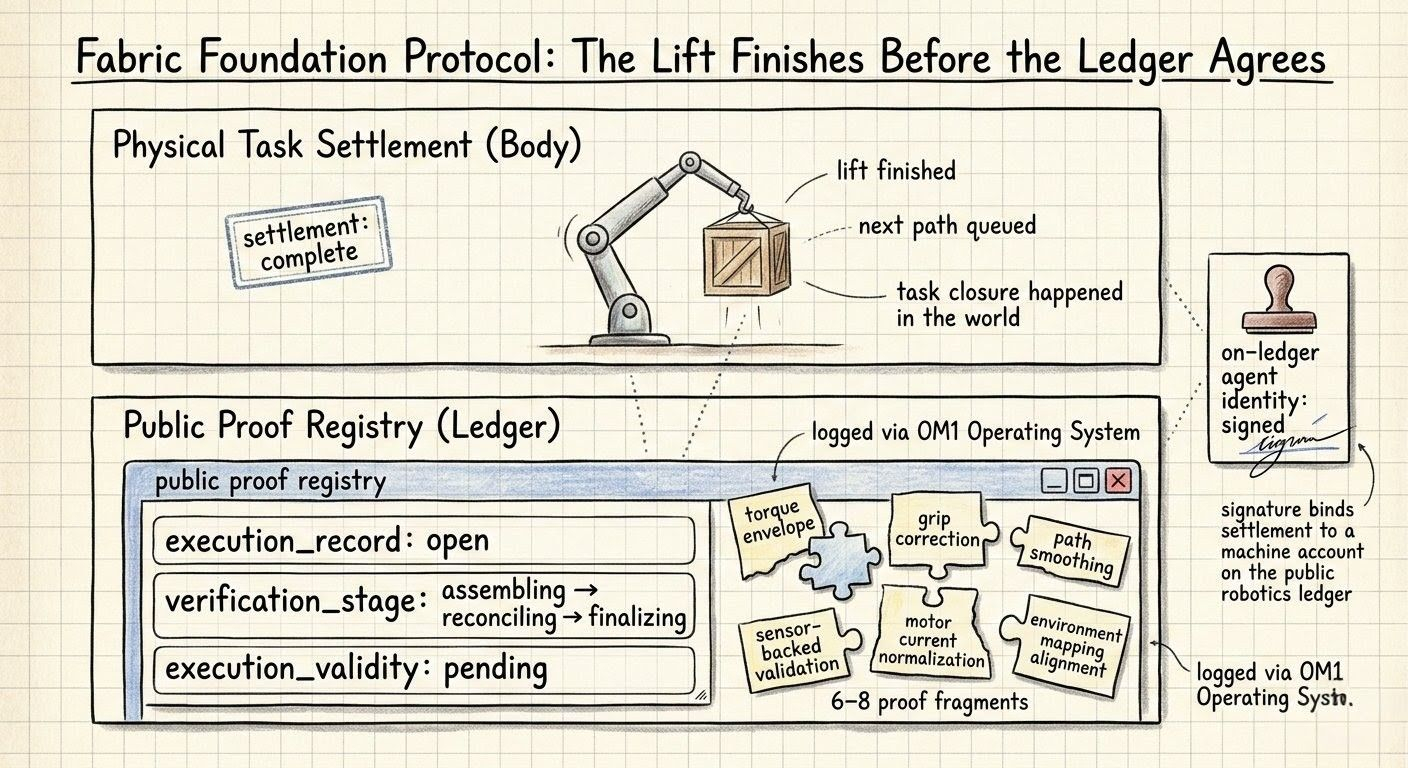
Three lines already sitting there while the verification panel still looked underfed. Public ledger coordination had the action. The proof path was still forming around it.
Not failing.
Worse.
Waiting.
I leaned closer to the screen and watched resource metering climb while the verification side stayed thin. One node had picked up the trace replay. Another sat in pending assignment. The third hadn’t joined yet. The robot was already idle by then, actuator cycle closed, telemetry quiet except for the little heartbeat packets that keep showing up when a machine has nothing left to prove except that it’s still there.
verification_nodes: 2
quorum_required: 4
actuator_temp: 48°C
Too early.
I scrolled back through the first trace because sometimes a machine closes a task before the last packet settles. That would have been easier to hate. Not this time. Motion log matched sensor readback. Completion timestamp sat 14 milliseconds after the last actuator movement. Clean enough to be irritating.
The system wasn’t doubting the robot.
The system was still gathering enough structure to agree with it.
I tried the command again with a shorter route. One less dependency. One less intermediate check. The path tightened, the replay got shorter, and the graph dipped just enough to make me do the stupid thing and try again.
proof_path_depth: 3
proof_path_depth: 2
Better.
Not generous.
So I pushed harder.
Ran a parallel instruction beside the first and watched it slide behind a validation lane I hadn’t planned around. No collision. No red flag. Just sequence. The first robot’s proof-of-execution records had already occupied the cleaner corridor, and the second one inherited that fact without asking.
I thought the second would squeeze through.
It didn’t.
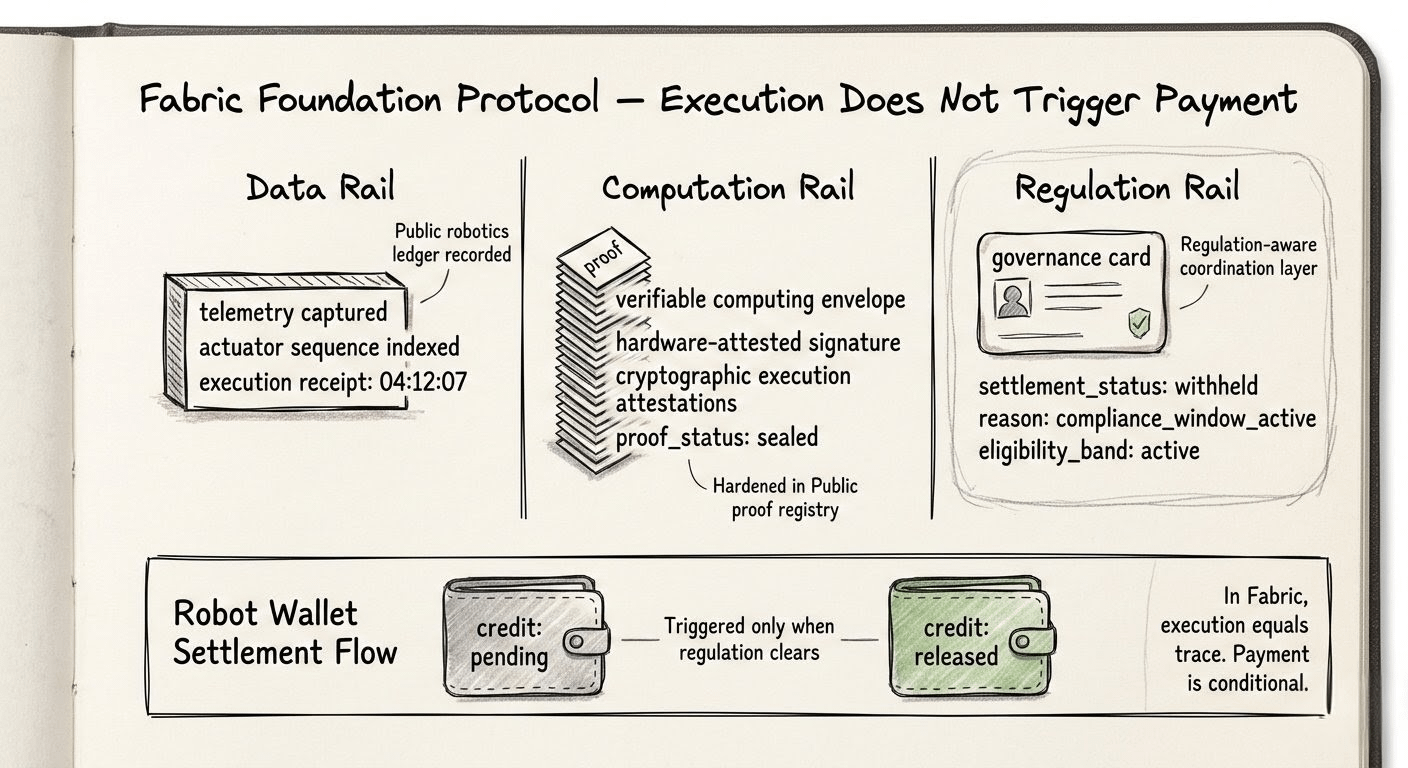
The queue held it there, polite and infuriating, while modular infrastructure kept resolving governance checks, safety hooks, and state updates from the first task. The panel still showed success. The ledger still showed work.
That split is where the discomfort lives.
Not in whether the robot moved.
In whether the network has finished deciding what that movement counts as.
I clicked into the verification panel again.
Wrong group.
Back.
Then the node view.
verification_nodes: 3
quorum_status: forming
verification_node: reassigned
Still not enough.
That was when the robot requested another task.
I almost missed it because I was staring at the first proof path like stubbornness could accelerate it.
new_task_request: queued
I sat up.
The first task was complete in the trace, half-formed in the quorum panel, and the machine was already leaning into the next cycle. That’s where Proof of Robotic Work (PoRW) anchoring stopped feeling like a keyword and started feeling like a scheduling problem with arms.
One task done.
One not yet socially real.
One more already asking to begin.
I trimmed another branch out of the path. Cut a convenience wrapper I liked because it made the flow easier to read. The robot didn’t care. The ledger did. The next run committed with a quieter replay and a shorter proof chain, but the bigger irritation stayed where it was: the machine could finish before the network had fully formed certainty around what it had done.
That’s the part people flatten when they say “automation.”
This wasn’t automation.
This was safe human-machine collaboration dragging explanation behind execution at the exact speed the system could defend.
I looked up just in time to catch the quorum panel flicker.
verification_nodes: 4
quorum_status: provisional
Enough to begin.
Not enough to forget what I’d already seen.
The robot had moved. The console told the simple story. The ledger told the expensive one. And the proof path was still there, one branch longer than the others, like the network wanted me to remember that completion and certainty are not the same event on Fabric.
I left that branch open.