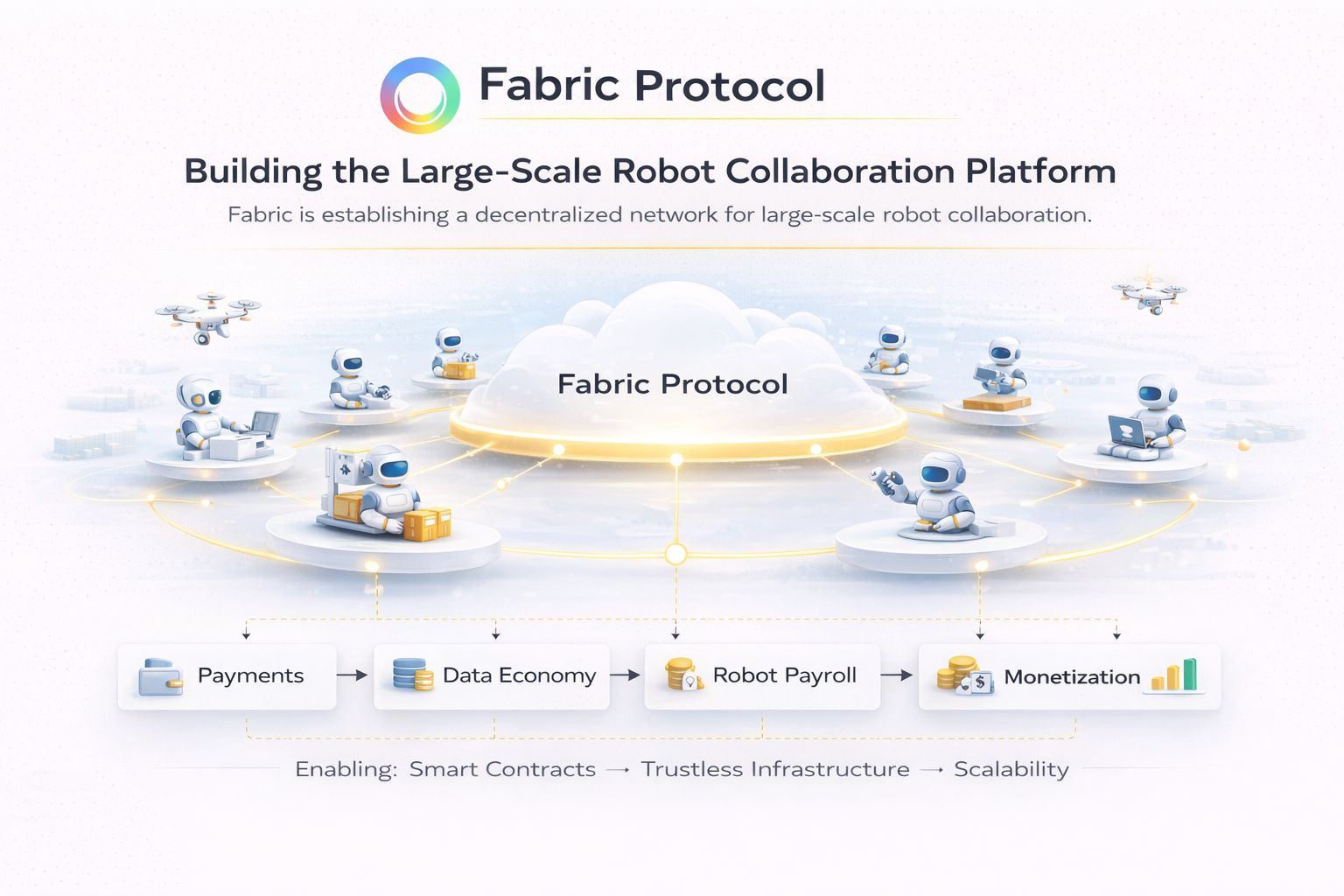
I noticed the latest official roadmap shows they are not stopping at just a few experimental robots. After completing the base layer in Q1/2026, the next goal is to expand into multi-robot collaboration workflows.
If done correctly as they describe, this will no longer be a story of a few individual robots operating, but many robots from different manufacturers can coordinate real tasks, share data, and settle payments on-chain.
The first point they are quite solid on is that robot identity comes with a separate wallet.
Each robot is assigned an independent identity along with a wallet $ROBO , and from my perspective, this is almost mandatory if large-scale collaboration is desired. Previously, it was very hard for a robot from company A to trust a robot from company B because everything was in a closed system.
And if each robot has a clear identity, a history of operations, and can receive payments separately, then it starts to resemble less an anonymous device and more like a real economic agent.
I find this important because it touches on the biggest bottleneck in robotics today: data and capabilities are still fragmented into silos.
If a robot learns a new skill in a real environment, theoretically Fabric wants to turn that into something that can be shared with many other robots in the network. At that point, a robot no longer learns just for itself. An operational experience can be disseminated across the fleet. This is the transition from small-scale collaboration to true collective intelligence.
The second layer is communication and data sharing.
According to Fabric's description, they are not just thinking about robots sending commands to each other. They are trying to build an environment where robots can exchange real-time context, share data securely, and use that to coordinate work.
I find this part is often overlooked by many, but it is actually very important.
Because if there is not enough fast and reliable data sharing, even with a million robots, in the end, it will still just be a million machines running in parallel, not forming a real coordinated system.
From my perspective, only when data is shared and verified well enough does large-scale robot collaboration make sense.
Without this layer, everything returns to the old model: robots work within their own scope, while humans stand in the middle to connect each piece. Fabric is trying to eliminate that intermediary part.
The next layer is task matching and settlement.
This is the part I find very practical. A robot collaboration system cannot just have data sharing for show. Ultimately, it still has to come back to who does what, who gets prioritized, when they get paid, and under what conditions they get paid. Fabric pulls this aspect into the system through contribution scores, bonds, rewards via PoRW, and settlements via ROBO.
In my opinion, this is what keeps large-scale collaboration sustainable in the long run.
Without clear economic incentives and strong penalty mechanisms, robots will only 'cooperate' on paper. But when there are bonds, slashing, verified work, and on-chain payments, then operators will have real reasons to expand their fleets and push many robots into the same network.
I find it interesting that Fabric does not just want robots to work. They want robots to be able to work, create value, and be compensated in measurable ways.
That is a very significant difference.
Their roadmap is also part of what caught my attention. If you look at how they divide the phases, you can see that Fabric is not jumping straight to the swarm intelligence narrative for hype, but is going layer by layer. Identity, task settlement, and data collection come first. PoRW and slashing come later. Then it’s on to multi-robot workflows and the ambition for a machine-native chain.
From my perspective, this approach makes much more sense than just launching a big narrative right from the start.
They also acknowledge that the initial phase still needs to use Base for testing, before thinking about a separate Fabric L1. This at least shows that the project seems to understand that the robot economy cannot be built in one step.
The point I find most noteworthy lies in the perspective against winner-takes-all.
If a few large companies hold all the data, skills, and coordination of the robots, then the entire robotics industry can easily get locked into closed ecosystems. Fabric is trying to go in the opposite direction. They want to make intelligence a more shared asset so that many companies, operators, and builders can participate in an open infrastructure layer.
I think this is where they strengthen their argument.
Because large-scale robot collaboration will not come from a company adding a few thousand robots. It will come from many different parties being able to bring robots into the same coordination logic, share data, verify outputs, and settle values together.
Of course, I also don't think we should romanticize too early.
The challenges are still very significant. Adoption from large manufacturers will not be easy. Regulatory frameworks for autonomous robots in many places are still unclear. The initial volume of tasks may still be thin. And real-world robotics is always more complex than what is on the roadmap.
But in my opinion, Fabric is doing exactly what this industry lacks the most.
Not just adding another OS. Not just adding another AI model.
But it is the layer of coordination combined with incentives for the entire swarm.
I am closely following the upcoming multi-robot workflow. If they can truly deliver a few clear swarm case studies in real life, especially in a practical environment and not just in demos, this could be a turning point not only for DePIN but for robotics as a whole.
@Fabric Foundation #ROBO $ROBO